#include <DMUAccelerometer.h>
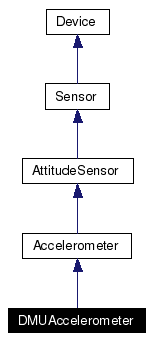
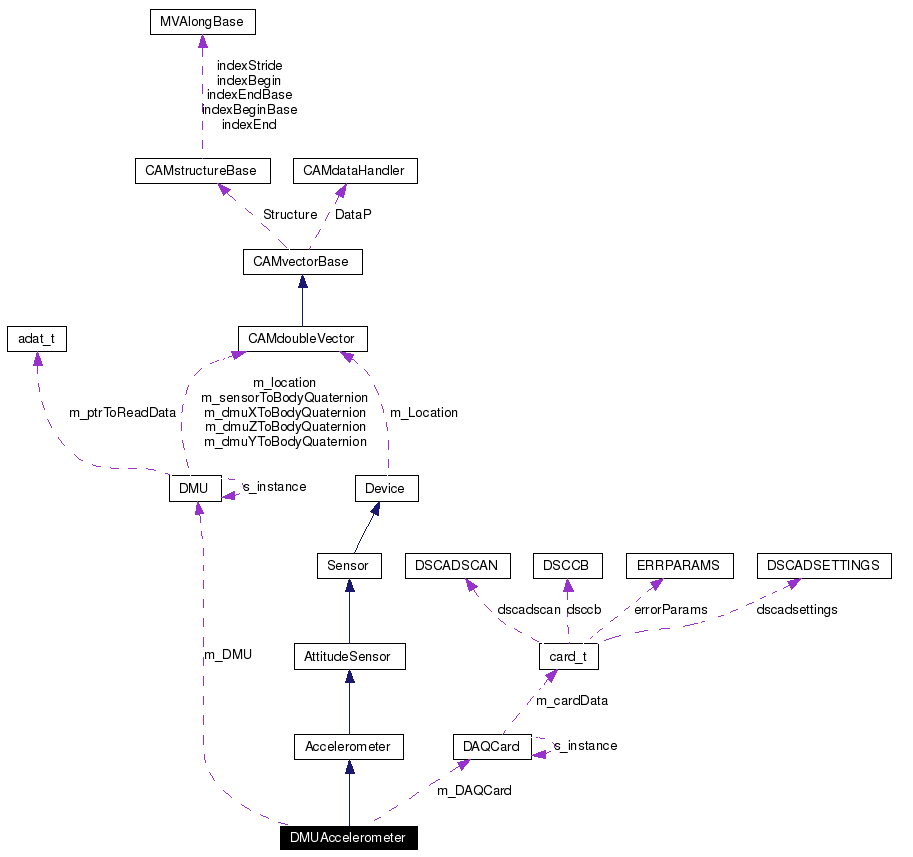
Inheritance diagram for DMUAccelerometer:
Public Member Functions | |
| DMUAccelerometer () | |
| Create an object of type DMUAccelerometer. | |
| DMUAccelerometer (TiXmlHandle handle, string accString) | |
| DMUAccelerometer constructor @ param handle XML handle with current whorl as starting node @ param accString name of accelerometer as given in xml config file. | |
| DMUAccelerometer (int _channel) | |
| ~DMUAccelerometer () | |
| int | Initialize () |
| Initializes the device for use. | |
| Measurement | GetMeasurement () |
| Vector | GetSensorToBodyQuaternion () |
| Vector | GetLocation () |
| int | GetMode () |
| bool | IsActive () |
| Returns the current state of m_bActiveState. | |
| Vector | GetLocation () const |
| Returns the physical location of the device with respect to whorl body coordinates. | |
| void | SetLocation (const Vector &newDeviceLocation) |
| Specify the physical location of the device with respect to whorl body coordinates. | |
Static Public Attributes | |
| const bool | c_bNotActive = false |
| a constant bool that is equal to false. | |
| const bool | c_bActive = true |
| a constant bool that is equal to true. | |
Protected Member Functions | |
| virtual int | Deinitialize () |
| Deinitializes the device from further use. | |
Protected Attributes | |
| char * | name |
Private Attributes | |
| DMU * | m_DMU |
| DAQCard * | m_DAQCard |
| int | m_channelID |
| int | m_mode |
| float | m_offset |
| float | m_accelScaleFactor |
|
|
Create an object of type DMUAccelerometer.
Definition at line 31 of file DMUAccelerometer.h. |
|
||||||||||||
|
DMUAccelerometer constructor @ param handle XML handle with current whorl as starting node @ param accString name of accelerometer as given in xml config file.
Definition at line 21 of file DMUAccelerometer.cpp. References checkResponse(), TiXmlHandle::Child(), TiXmlHandle::Element(), TiXmlHandle::FirstChild(), Initialize(), m_accelScaleFactor, m_channelID, m_mode, and m_offset. |
|
|
Definition at line 35 of file DMUAccelerometer.h. References Initialize(), and m_channelID. |
|
|
Definition at line 41 of file DMUAccelerometer.h. |
|
|
Deinitializes the device from further use.
Reimplemented in ControlMomentGyro, LinearActuator, MomentumWheel, PhysicalControlMomentGyro, and PhysicalMomentumWheel. Definition at line 113 of file Device.cpp. References Device::c_bNotActive, and Device::SetActive(). Referenced by Device::~Device(), Relay::~Relay(), and Thruster::~Thruster(). |
|
|
Returns the physical location of the device with respect to whorl body coordinates.
Definition at line 75 of file Device.cpp. References O_SESSAME::Vector. |
|
|
Gets sensor location Definition at line 113 of file DMUAccelerometer.h. References DMU::GetLocation(), m_DMU, and O_SESSAME::Vector. |
|
|
Gets current measurement Implements Sensor. Definition at line 58 of file DMUAccelerometer.h. References DMU::GetAnalogReading(), DMU::GetDigitalReading(), m_channelID, m_DAQCard, m_DMU, and Measurement::SetTime(). |
|
|
Gets the operating mode, either digital (1) or analog (2) (mainly for debugging purposes) Definition at line 116 of file DMUAccelerometer.h. |
|
|
Gets sensor to body quaternion Implements AttitudeSensor. Definition at line 110 of file DMUAccelerometer.h. References DMU::GetSensorToBodyQuaternion(), m_channelID, m_DMU, and O_SESSAME::Vector. |
|
|
Initializes the device for use.
Reimplemented from Device. Definition at line 43 of file DMUAccelerometer.h. References DAQCard::Instance(), DMU::Instance(), m_DAQCard, m_DMU, and m_mode. Referenced by DMUAccelerometer(). |
|
|
Returns the current state of m_bActiveState.
Definition at line 59 of file Device.cpp. Referenced by Device::Device(). |
|
|
Specify the physical location of the device with respect to whorl body coordinates.
Definition at line 67 of file Device.cpp. References Device::m_Location, and O_SESSAME::Vector. |
|
|
a constant bool that is equal to true. Used for setting the active state Definition at line 50 of file Device.h. Referenced by Device::Initialize(). |
|
|
a constant bool that is equal to false. Used for setting the active state. Definition at line 48 of file Device.h. Referenced by Device::Deinitialize(), and Device::Device(). |
|
|
acceleration scale factor in units of V/g Definition at line 129 of file DMUAccelerometer.h. Referenced by DMUAccelerometer(). |
|
|
channel of sensor in DMU Definition at line 126 of file DMUAccelerometer.h. Referenced by DMUAccelerometer(), GetMeasurement(), and GetSensorToBodyQuaternion(). |
|
|
pointer to instance of the DAQ card Definition at line 124 of file DMUAccelerometer.h. Referenced by GetMeasurement(), and Initialize(). |
|
|
pointer to the instance of the DMU physical device Definition at line 122 of file DMUAccelerometer.h. Referenced by GetLocation(), GetMeasurement(), GetSensorToBodyQuaternion(), and Initialize(). |
|
|
mode of operation for the sensor in the DMU, where 1 = digital and 2 = analog Definition at line 127 of file DMUAccelerometer.h. Referenced by DMUAccelerometer(), and Initialize(). |
|
|
calibration offset value in units of V Definition at line 128 of file DMUAccelerometer.h. Referenced by DMUAccelerometer(). |
|
|
|
 1.3.9.1
1.3.9.1