#include <DMU.h>
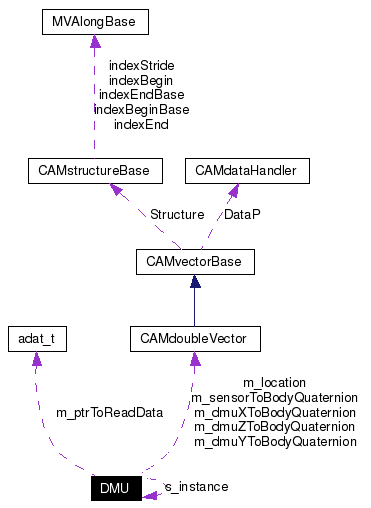
Collaboration diagram for DMU:
Public Member Functions | |
| DMU (int _mode) | |
| ~DMU () | |
| void | GetDigitalReading (int _channelID, timeval &_timeStamp, double &_rateData) |
| void | GetAnalogReading (int _channelID, DAQCard *_mycard, timeval &_timeStamp, double &_rateData) |
| Vector | GetLocation () |
| Vector | GetSensorToBodyQuaternion (int id) |
| int | Initialize (int _mode) |
| void | SetLocation (const Vector &newDeviceLocation) |
| void | SetSensorToBodyQuaternions (const Vector &newDeviceQuaternion) |
Static Public Member Functions | |
| DMU * | Instance (int _mode) |
Private Attributes | |
| Vector | m_location |
| Vector | m_sensorToBodyQuaternion |
| Vector | m_dmuXToBodyQuaternion |
| Vector | m_dmuYToBodyQuaternion |
| Vector | m_dmuZToBodyQuaternion |
| adat_t * | m_ptrToReadData |
| int | m_prate |
| int | m_tempBuffSize |
| timeval | m_initTime |
| timeval | m_GetReadingTime |
| long | m_delta_t |
| long | m_timeToler |
| int | m_firstCall |
| int | m_numread |
Static Private Attributes | |
| DMU * | s_instance = NULL |
|
|
Constructors Definition at line 20 of file realDMU.cpp. References Initialize(). Referenced by Instance(). |
|
|
Deconstructors Definition at line 358 of file fakeDMU.cpp. |
|
||||||||||||||||||||
|
Gets the reading when the MoPak is used in analog operating mode Definition at line 216 of file realDMU.cpp. References ADscan(), DAQCard::m_cardData, and m_GetReadingTime. Referenced by DMURateGyro::GetMeasurement(), and DMUAccelerometer::GetMeasurement(). |
|
||||||||||||||||
|
Gets the reading when the MoPak is used in digital operating mode Definition at line 227 of file realDMU.cpp. References dmuReadData(), m_delta_t, m_firstCall, m_GetReadingTime, m_numread, m_ptrToReadData, m_tempBuffSize, adat_t::temp, adat_t::xaccel, adat_t::xrate, adat_t::yaccel, adat_t::yrate, adat_t::zaccel, and adat_t::zrate. Referenced by DMURateGyro::GetMeasurement(), and DMUAccelerometer::GetMeasurement(). |
|
|
Get the location of the MoPak Definition at line 184 of file fakeDMU.cpp. References O_SESSAME::Vector. Referenced by DMUTemperatureSensor::GetLocation(), DMURateGyro::GetLocation(), and DMUAccelerometer::GetLocation(). |
|
|
Get the quaternion from the Sensor frame to the body frame Definition at line 269 of file fakeDMU.cpp. References O_SESSAME::Vector. Referenced by DMURateGyro::GetSensorToBodyQuaternion(), and DMUAccelerometer::GetSensorToBodyQuaternion(). |
|
|
Initialize the attitude sensor Definition at line 42 of file realDMU.cpp. References dmuInit(), m_firstCall, m_numread, m_prate, m_ptrToReadData, m_tempBuffSize, m_timeToler, SetLocation(), SetSensorToBodyQuaternions(), and O_SESSAME::Vector. Referenced by DMU(). |
|
|
Function to return an instance of a single DMU, to prevent the application from trying to create multiple physical DMUs Definition at line 25 of file realDMU.cpp. References DMU(), and s_instance. Referenced by DMURateGyro::Initialize(), and DMUAccelerometer::Initialize(). |
|
|
Set the location of the physical DMU device. Definition at line 179 of file fakeDMU.cpp. References m_location, and O_SESSAME::Vector. Referenced by Initialize(). |
|
|
Set the DMU to body quaternion, and from that the individual quaternions for each the sensors that comprise the DMU. Definition at line 189 of file fakeDMU.cpp. References O_SESSAME::Rotation::GetQuaternion(), m_dmuXToBodyQuaternion, m_dmuYToBodyQuaternion, m_dmuZToBodyQuaternion, m_sensorToBodyQuaternion, and O_SESSAME::Vector. Referenced by Initialize(). |
|
|
Definition at line 91 of file DMU.h. Referenced by GetDigitalReading(). |
|
|
Definition at line 79 of file DMU.h. Referenced by SetSensorToBodyQuaternions(). |
|
|
Definition at line 80 of file DMU.h. Referenced by SetSensorToBodyQuaternions(). |
|
|
Definition at line 81 of file DMU.h. Referenced by SetSensorToBodyQuaternions(). |
|
|
Definition at line 93 of file DMU.h. Referenced by GetDigitalReading(), and Initialize(). |
|
|
Definition at line 90 of file DMU.h. Referenced by GetAnalogReading(), and GetDigitalReading(). |
|
|
|
|
|
Definition at line 76 of file DMU.h. Referenced by SetLocation(). |
|
|
Definition at line 94 of file DMU.h. Referenced by GetDigitalReading(), and Initialize(). |
|
|
Definition at line 85 of file DMU.h. Referenced by Initialize(). |
|
|
Definition at line 83 of file DMU.h. Referenced by GetDigitalReading(), and Initialize(). |
|
|
Definition at line 77 of file DMU.h. Referenced by SetSensorToBodyQuaternions(). |
|
|
Definition at line 86 of file DMU.h. Referenced by GetDigitalReading(), and Initialize(). |
|
|
Definition at line 92 of file DMU.h. Referenced by Initialize(). |
|
|
A static instance of a DMU, declared here and defined elsewhere, to assure all separate rate gyros and accelerometers refer to the same single DMU Definition at line 18 of file realDMU.cpp. Referenced by Instance(). |
 1.3.9.1
1.3.9.1