#include <PhysicalControlMomentGyro.h>
Inheritance diagram for PhysicalControlMomentGyro:
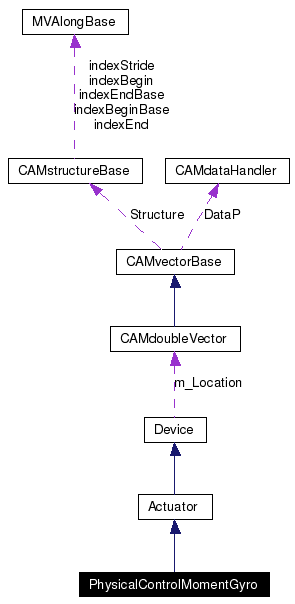
Definition at line 36 of file PhysicalControlMomentGyro.h.
Public Member Functions | |
| PhysicalControlMomentGyro () | |
| virtual | ~PhysicalControlMomentGyro () |
| void | CommandWheelSpeed (double wheelOmega) |
| void | CommandWheelTorque (double wheelTorque) |
| void | CommandAngle (double wheelAngle) |
| void | CommandGimbalRate (double gimbalRate) |
| int | Stop () |
| int | Initialize () |
| int | Deinitialize () |
| void | SetWheelSpeedLimits (double minWheelSpeed, double maxWheelSpeed) |
| void | SetWheelTorqueLimits (double minWheelTorque, double maxWheelTorque) |
| void | SetMaxTorqueStep (double maxTorqueStep) |
| void | SetDaisyChainNumber (int DaisyChainNumber) |
| void | SetDaisyChainPort (string Port) |
| double | QueryWheelSpeed () |
| double | QueryWheelTorque () |
| double | QueryAngle () |
| void | GetWheelSpeedLimits (double &minWheelSpeed, double &maxWheelSpeed) |
| void | GetWheelTorqueLimits (double &minWheelTorque, double &maxWheelTorque) |
| void | GetMaxTorqueStep (double &maxTorqueStep) |
| virtual int | GetWheelCount () |
| bool | IsActive () |
| Returns the current state of m_bActiveState. | |
| Vector | GetLocation () const |
| Returns the physical location of the device with respect to whorl body coordinates. | |
| void | SetLocation (const Vector &newDeviceLocation) |
| Specify the physical location of the device with respect to whorl body coordinates. | |
Static Public Attributes | |
| const bool | c_bNotActive = false |
| a constant bool that is equal to false. | |
| const bool | c_bActive = true |
| a constant bool that is equal to true. | |
Protected Attributes | |
| char * | name |
Private Member Functions | |
| void | GoCommand (int Address) |
| void | FindLimits () |
Private Attributes | |
| double | m_CurrentWheelSpeed |
| double | m_CurrentWheelTorque |
| double | m_CurrentAngle |
| double | m_CurrentLAVelocity |
| double | m_CurrentLAAcceleration |
| int | m_LAMax |
| int | m_LAMin |
| int | m_LAMid |
| int | m_WheelAddress |
| int | m_LAAddress |
| string | m_DaisyChainPort |
| int | m_DaisyChainNumber |
| double | m_MaxWheelSpeed |
| double | m_MinWheelSpeed |
| double | m_MaxWheelTorque |
| double | m_MinWheelTorque |
| double | m_MaxTorqueStep |
Static Private Attributes | |
| int | m_fd = -1 |
|
|
Default Constructor Definition at line 22 of file PhysicalControlMomentGyro.cpp. |
|
|
Default Deconstructor Definition at line 26 of file PhysicalControlMomentGyro.cpp. References Stop(). |
|
|
Set the angle of the wheel axis with respect to its center position
Definition at line 73 of file PhysicalControlMomentGyro.cpp. References GoCommand(), m_CurrentAngle, m_fd, m_LAAddress, m_LAMid, and say(). Referenced by ControlMomentGyro::SetAngle(). |
|
|
Set the gimbal angle rate of the CMG
Definition at line 100 of file PhysicalControlMomentGyro.cpp. References GoCommand(), m_fd, m_LAAddress, and say(). Referenced by ControlMomentGyro::SetGimbalRate(). |
|
|
Set angular velocity of the CMG wheel
Definition at line 37 of file PhysicalControlMomentGyro.cpp. References GoCommand(), m_fd, m_WheelAddress, and say(). Referenced by ControlMomentGyro::SetWheelSpeed(), and Stop(). |
|
|
Set torque output to the CMG wheel
Definition at line 53 of file PhysicalControlMomentGyro.cpp. References m_CurrentWheelTorque, m_fd, m_WheelAddress, and say(). Referenced by ControlMomentGyro::SetWheelTorque(), and Stop(). |
|
|
Deinitialize all components of the CMG Reimplemented from Device. Definition at line 252 of file PhysicalControlMomentGyro.cpp. References m_fd. Referenced by ControlMomentGyro::Deinitialize(). |
|
|
Private function used to initialize the the linear actuator by finding its upper and lower limits and then repositioning itself to the center of its travel Definition at line 444 of file PhysicalControlMomentGyro.cpp. References GoCommand(), hear(), m_fd, m_LAAddress, m_LAMax, m_LAMid, m_LAMin, and say(). Referenced by Initialize(). |
|
|
Returns the physical location of the device with respect to whorl body coordinates.
Definition at line 75 of file Device.cpp. References O_SESSAME::Vector. |
|
|
Sets maxTorqueStep to the maximun allowable chang in torque values Definition at line 428 of file PhysicalControlMomentGyro.cpp. |
|
|
Reimplemented in MomentumWheel. Definition at line 27 of file Actuator.h. |
|
||||||||||||
|
Get the angular velocity limts of the CMG wheel
Definition at line 414 of file PhysicalControlMomentGyro.cpp. |
|
||||||||||||
|
Get the torque output limts to the CMG wheel
Definition at line 421 of file PhysicalControlMomentGyro.cpp. |
|
|
Private member function to send a Go command to the smart motor
Definition at line 434 of file PhysicalControlMomentGyro.cpp. Referenced by CommandAngle(), CommandGimbalRate(), CommandWheelSpeed(), FindLimits(), and Initialize(). |
|
|
Initialize all components of the CMG Reimplemented from Actuator. Definition at line 139 of file PhysicalControlMomentGyro.cpp. References FindLimits(), GoCommand(), init_serial(), m_DaisyChainPort, m_fd, m_LAAddress, m_WheelAddress, and say(). Referenced by ControlMomentGyro::Initialize(). |
|
|
Returns the current state of m_bActiveState.
Definition at line 59 of file Device.cpp. Referenced by Device::Device(). |
|
|
Get the current angle of the CMG wheel axis with respect ot its center position, returns a double in radians Definition at line 389 of file PhysicalControlMomentGyro.cpp. References hear(), m_CurrentAngle, m_fd, m_LAAddress, and say(). Referenced by ControlMomentGyro::GetAngle(). |
|
|
Get the angular velocity of the CMG wheel, returns a double in rad/sec Definition at line 298 of file PhysicalControlMomentGyro.cpp. References hear(), m_CurrentWheelSpeed, m_fd, m_WheelAddress, and say(). Referenced by ControlMomentGyro::GetWheelSpeed(). |
|
|
Get the current torque output to the CMG wheel, returns a double in N-m Definition at line 363 of file PhysicalControlMomentGyro.cpp. References hear(), m_CurrentWheelTorque, m_fd, m_WheelAddress, and say(). Referenced by ControlMomentGyro::GetWheelTorque(). |
|
|
Set which daisy chain the CMG is located on Definition at line 284 of file PhysicalControlMomentGyro.cpp. References m_DaisyChainNumber. Referenced by ControlMomentGyro::ControlMomentGyro(). |
|
|
Set the port to which the CMG is plugged into
Definition at line 289 of file PhysicalControlMomentGyro.cpp. References m_DaisyChainPort. Referenced by ControlMomentGyro::ControlMomentGyro(), ControlMomentGyro::Initialize(), and ControlMomentGyro::SetPort(). |
|
|
Specify the physical location of the device with respect to whorl body coordinates.
Definition at line 67 of file Device.cpp. References Device::m_Location, and O_SESSAME::Vector. |
|
|
Set the maximum change in torque outputs
Definition at line 279 of file PhysicalControlMomentGyro.cpp. References m_MaxTorqueStep. |
|
||||||||||||
|
Set the maximum and minimum angular speeds of the CMG wheel
Definition at line 265 of file PhysicalControlMomentGyro.cpp. References m_MaxWheelSpeed, and m_MinWheelSpeed. |
|
||||||||||||
|
Set the maximum and minimum torque outputs to the CMG wheel
Definition at line 272 of file PhysicalControlMomentGyro.cpp. References m_MaxWheelTorque, and m_MinWheelTorque. Referenced by ControlMomentGyro::ControlMomentGyro(). |
|
|
Stop the CMG wheel Implements Actuator. Definition at line 131 of file PhysicalControlMomentGyro.cpp. References CommandWheelSpeed(), and CommandWheelTorque(). Referenced by ControlMomentGyro::Stop(), and ~PhysicalControlMomentGyro(). |
|
|
a constant bool that is equal to true. Used for setting the active state Definition at line 50 of file Device.h. Referenced by Device::Initialize(). |
|
|
a constant bool that is equal to false. Used for setting the active state. Definition at line 48 of file Device.h. Referenced by Device::Deinitialize(), and Device::Device(). |
|
|
Double for the current angle of the wheel axis with respect to its center position in radians Definition at line 142 of file PhysicalControlMomentGyro.h. Referenced by CommandAngle(), and QueryAngle(). |
|
|
Double holding the acceleration of the LA Definition at line 148 of file PhysicalControlMomentGyro.h. |
|
|
Double holding the current LA velocity Definition at line 145 of file PhysicalControlMomentGyro.h. |
|
|
Double for the current wheel speed in rad/sec Definition at line 136 of file PhysicalControlMomentGyro.h. Referenced by QueryWheelSpeed(). |
|
|
double for the current wheel torque output in N-m Definition at line 139 of file PhysicalControlMomentGyro.h. Referenced by CommandWheelTorque(), and QueryWheelTorque(). |
|
|
THe number of the daisy chain that the CMG is on Definition at line 172 of file PhysicalControlMomentGyro.h. Referenced by SetDaisyChainNumber(). |
|
|
String holding the port to which the CMG is connected Definition at line 169 of file PhysicalControlMomentGyro.h. Referenced by Initialize(), and SetDaisyChainPort(). |
|
|
Static integer representing the file descriptor for talking to the CMG Definition at line 16 of file PhysicalControlMomentGyro.cpp. Referenced by CommandAngle(), CommandGimbalRate(), CommandWheelSpeed(), CommandWheelTorque(), Deinitialize(), FindLimits(), GoCommand(), Initialize(), QueryAngle(), QueryWheelSpeed(), and QueryWheelTorque(). |
|
|
THe integer address of the LA Definition at line 163 of file PhysicalControlMomentGyro.h. Referenced by CommandAngle(), CommandGimbalRate(), FindLimits(), Initialize(), and QueryAngle(). |
|
|
the maximum position count of the LA Definition at line 151 of file PhysicalControlMomentGyro.h. Referenced by FindLimits(). |
|
|
The position count at mid-travel for the LA Definition at line 157 of file PhysicalControlMomentGyro.h. Referenced by CommandAngle(), and FindLimits(). |
|
|
the minimum position count of the LA Definition at line 154 of file PhysicalControlMomentGyro.h. Referenced by FindLimits(). |
|
|
MAximum allowable change in consecutive torque values Definition at line 187 of file PhysicalControlMomentGyro.h. Referenced by SetMaxTorqueStep(). |
|
|
MAximun allowable wheel speed in rad/sec Definition at line 175 of file PhysicalControlMomentGyro.h. Referenced by SetWheelSpeedLimits(). |
|
|
Maximum torque output to the wheel in N-m Definition at line 181 of file PhysicalControlMomentGyro.h. Referenced by SetWheelTorqueLimits(). |
|
|
Minimum allowable wheel speed in rad/sec Definition at line 178 of file PhysicalControlMomentGyro.h. Referenced by SetWheelSpeedLimits(). |
|
|
Minimum torque output to the wheel in N-m Definition at line 184 of file PhysicalControlMomentGyro.h. Referenced by SetWheelTorqueLimits(). |
|
|
THe integer address of the CMG wheel Definition at line 160 of file PhysicalControlMomentGyro.h. Referenced by CommandWheelSpeed(), CommandWheelTorque(), Initialize(), QueryWheelSpeed(), and QueryWheelTorque(). |
|
|
|
 1.3.9.1
1.3.9.1