#include <ControlMomentGyro.h>
Inheritance diagram for ControlMomentGyro:
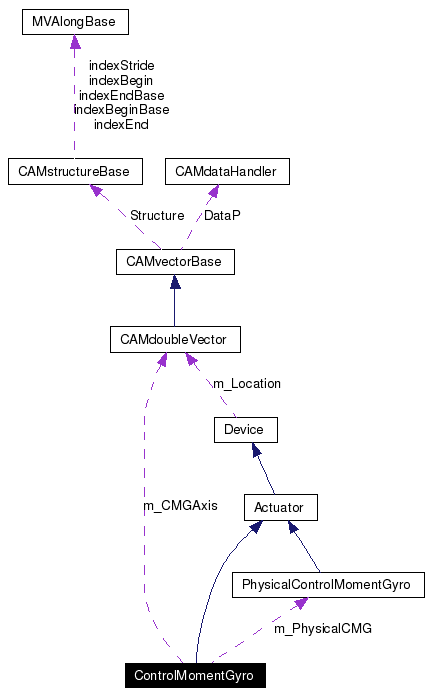
Definition at line 32 of file ControlMomentGyro.h.
Public Member Functions | |
| ControlMomentGyro () | |
| ControlMomentGyro (cfgBody &cfgdat) | |
| virtual | ~ControlMomentGyro () |
| void | SetWheelSpeed (double wheelOmega) |
| void | SetWheelTorque (double wheelTorque) |
| void | SetAngle (double wheelAngle) |
| void | SetGimbalRate (double gimbalRate) |
| int | Stop () |
| int | Initialize () |
| int | Deinitialize () |
| void | SetWheelAxis (const Vector &newWheelAxis) |
| void | SetPort (string Port) |
| double | GetWheelSpeed () |
| double | GetWheelTorque () |
| double | GetAngle () |
| Vector | GetCMGAxis () const |
| int | getGyroCount () const |
| virtual int | GetWheelCount () |
| bool | IsActive () |
| Returns the current state of m_bActiveState. | |
| Vector | GetLocation () const |
| Returns the physical location of the device with respect to whorl body coordinates. | |
| void | SetLocation (const Vector &newDeviceLocation) |
| Specify the physical location of the device with respect to whorl body coordinates. | |
Static Public Attributes | |
| const bool | c_bNotActive = false |
| a constant bool that is equal to false. | |
| const bool | c_bActive = true |
| a constant bool that is equal to true. | |
Protected Attributes | |
| char * | name |
Private Attributes | |
| double | m_CurrentWheelSpeed |
| double | m_CurrentWheelTorque |
| double | m_CurrentAngle |
| Vector | m_CMGAxis |
| double | m_CurrentLAVelocity |
| double | m_CurrentLAAcceleration |
| PhysicalControlMomentGyro | m_PhysicalCMG |
Static Private Attributes | |
| int | gyroCount = 0 |
|
|
Default Constructor Definition at line 19 of file ControlMomentGyro.cpp. |
|
|
Constructor accepting a cfg object Definition at line 74 of file ControlMomentGyro.cpp. References getCmdIndex(), cfgBody::keys, m_PhysicalCMG, PhysicalControlMomentGyro::SetDaisyChainNumber(), PhysicalControlMomentGyro::SetDaisyChainPort(), PhysicalControlMomentGyro::SetWheelTorqueLimits(), and cfgBody::vals. |
|
|
Default Deconstructor Definition at line 24 of file ControlMomentGyro.cpp. References Deinitialize(), gyroCount, and Stop(). |
|
|
Deinitialize all CMG components Reimplemented from Device. Definition at line 108 of file ControlMomentGyro.cpp. References PhysicalControlMomentGyro::Deinitialize(), and m_PhysicalCMG. Referenced by main(), and ~ControlMomentGyro(). |
|
|
Returns the current angle of the wheel axis with respect to its center line in radians Definition at line 147 of file ControlMomentGyro.cpp. References m_CurrentAngle, m_PhysicalCMG, and PhysicalControlMomentGyro::QueryAngle(). |
|
|
Returns a 3x1 vector of the CMG axis Definition at line 154 of file ControlMomentGyro.cpp. References O_SESSAME::Vector. |
|
|
Returns the total number of CMGs instantiated Definition at line 160 of file ControlMomentGyro.cpp. |
|
|
Returns the physical location of the device with respect to whorl body coordinates.
Definition at line 75 of file Device.cpp. References O_SESSAME::Vector. |
|
|
Reimplemented in MomentumWheel. Definition at line 27 of file Actuator.h. |
|
|
Returns the current angular velocity of the CMG wheel in rad/sec Definition at line 134 of file ControlMomentGyro.cpp. References m_CurrentWheelSpeed, m_PhysicalCMG, and PhysicalControlMomentGyro::QueryWheelSpeed(). |
|
|
Returns the current torque output to the CMG wheel in N-m Definition at line 140 of file ControlMomentGyro.cpp. References m_CurrentWheelTorque, m_PhysicalCMG, and PhysicalControlMomentGyro::QueryWheelTorque(). |
|
|
Initialize the both the linear actuator and wheel on the CMG chain Reimplemented from Actuator. Definition at line 65 of file ControlMomentGyro.cpp. References PhysicalControlMomentGyro::Initialize(), m_PhysicalCMG, and PhysicalControlMomentGyro::SetDaisyChainPort(). Referenced by main(). |
|
|
Returns the current state of m_bActiveState.
Definition at line 59 of file Device.cpp. Referenced by Device::Device(). |
|
|
Set the angle of the wheel axis with respect to the center of its travel
Definition at line 49 of file ControlMomentGyro.cpp. References PhysicalControlMomentGyro::CommandAngle(), and m_PhysicalCMG. Referenced by main(). |
|
|
Set the gimbal angle rate of the CMG
Definition at line 54 of file ControlMomentGyro.cpp. References PhysicalControlMomentGyro::CommandGimbalRate(), and m_PhysicalCMG. |
|
|
Specify the physical location of the device with respect to whorl body coordinates.
Definition at line 67 of file Device.cpp. References Device::m_Location, and O_SESSAME::Vector. |
|
|
Set communications port Definition at line 125 of file ControlMomentGyro.cpp. References m_PhysicalCMG, and PhysicalControlMomentGyro::SetDaisyChainPort(). |
|
|
Set the axis of the CMG with a 3x1 vector Definition at line 120 of file ControlMomentGyro.cpp. References m_CMGAxis, and O_SESSAME::Vector. |
|
|
Set the speed of the CMG wheel
Definition at line 39 of file ControlMomentGyro.cpp. References PhysicalControlMomentGyro::CommandWheelSpeed(), and m_PhysicalCMG. Referenced by main(). |
|
|
Set the torque output to the wheel of the CMG
Definition at line 44 of file ControlMomentGyro.cpp. References PhysicalControlMomentGyro::CommandWheelTorque(), and m_PhysicalCMG. |
|
|
Stop the CMG wheel Implements Actuator. Definition at line 59 of file ControlMomentGyro.cpp. References m_PhysicalCMG, and PhysicalControlMomentGyro::Stop(). Referenced by main(), and ~ControlMomentGyro(). |
|
|
a constant bool that is equal to true. Used for setting the active state Definition at line 50 of file Device.h. Referenced by Device::Initialize(). |
|
|
a constant bool that is equal to false. Used for setting the active state. Definition at line 48 of file Device.h. Referenced by Device::Deinitialize(), and Device::Device(). |
|
|
Static integer that holds the total number of CMGs instantiated Definition at line 18 of file ControlMomentGyro.cpp. Referenced by ~ControlMomentGyro(). |
|
|
3x1 Vector that holds axis of the CMG Definition at line 117 of file ControlMomentGyro.h. Referenced by SetWheelAxis(). |
|
|
Double that holds the current angle of the wheel axis with respect to its center point in radians Definition at line 114 of file ControlMomentGyro.h. Referenced by GetAngle(). |
|
|
Double that holds the accelerations setting for the linear actuator Definition at line 123 of file ControlMomentGyro.h. |
|
|
Double that holds the velocity setting for the linear actuator Definition at line 120 of file ControlMomentGyro.h. |
|
|
Double that holds the current angular velocity of the CMG wheel in rad/sec Definition at line 108 of file ControlMomentGyro.h. Referenced by GetWheelSpeed(). |
|
|
Double that holds the current torque output to the wheel in N-m Definition at line 111 of file ControlMomentGyro.h. Referenced by GetWheelTorque(). |
|
|
Memeber PhysicalControlMomentGyro object Definition at line 126 of file ControlMomentGyro.h. Referenced by ControlMomentGyro(), Deinitialize(), GetAngle(), GetWheelSpeed(), GetWheelTorque(), Initialize(), SetAngle(), SetGimbalRate(), SetPort(), SetWheelSpeed(), SetWheelTorque(), and Stop(). |
|
|
|
 1.3.9.1
1.3.9.1