#include <DMURateGyro.h>
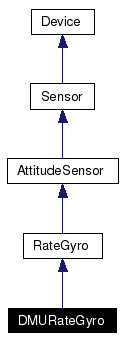
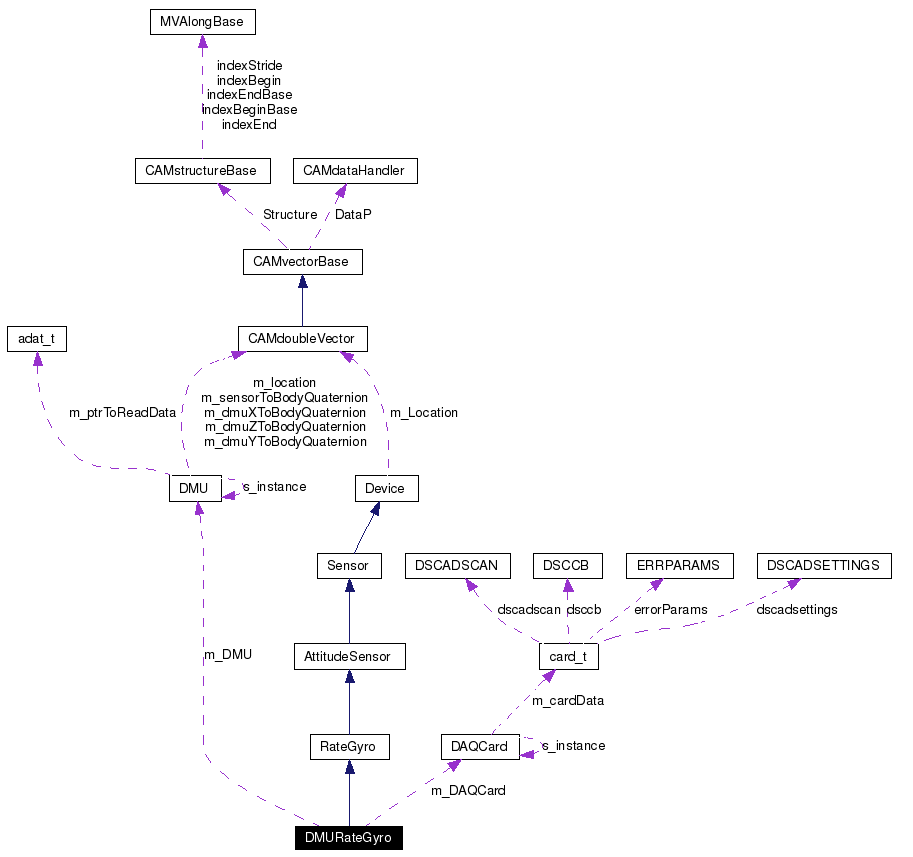
Inheritance diagram for DMURateGyro:
Public Member Functions | |
| DMURateGyro () | |
| DMURateGyro (int _channel) | |
| DMURateGyro (TiXmlHandle handle, string rateGyro) | |
| DMURateGyro constructor @ param handle XML handle with current whorl as starting node @ param rateGyro rate gyro name as given in xml config file. | |
| ~DMURateGyro () | |
| int | Initialize () |
| Measurement | GetMeasurement () |
| Vector | GetSensorToBodyQuaternion () |
| Vector | GetLocation () |
| int | GetMode () |
| bool | IsActive () |
| Returns the current state of m_bActiveState. | |
| Vector | GetLocation () const |
| Returns the physical location of the device with respect to whorl body coordinates. | |
| void | SetLocation (const Vector &newDeviceLocation) |
| Specify the physical location of the device with respect to whorl body coordinates. | |
Static Public Attributes | |
| const bool | c_bNotActive = false |
| a constant bool that is equal to false. | |
| const bool | c_bActive = true |
| a constant bool that is equal to true. | |
Protected Member Functions | |
| virtual int | Deinitialize () |
| Deinitializes the device from further use. | |
Protected Attributes | |
| char * | name |
Private Attributes | |
| DMU * | m_DMU |
| DAQCard * | m_DAQCard |
| int | m_channelID |
| int | m_mode |
| float | m_offset |
| float | m_rateScaleFactor |
|
|
create an object of type DMURateGyro Definition at line 32 of file DMURateGyro.h. |
|
|
constructor which accepts argument to set the channel id Definition at line 35 of file DMURateGyro.h. References Initialize(), and m_channelID. |
|
||||||||||||
|
DMURateGyro constructor @ param handle XML handle with current whorl as starting node @ param rateGyro rate gyro name as given in xml config file. (standard) constructor which accepts the config file parsing information Definition at line 19 of file DMURateGyro.cpp. References checkResponse(), TiXmlHandle::Child(), TiXmlHandle::Element(), TiXmlHandle::FirstChild(), Measurement::GetAsDouble(), GetMeasurement(), Initialize(), m_channelID, m_mode, m_offset, and m_rateScaleFactor. |
|
|
Definition at line 44 of file DMURateGyro.h. |
|
|
Deinitializes the device from further use.
Reimplemented in ControlMomentGyro, LinearActuator, MomentumWheel, PhysicalControlMomentGyro, and PhysicalMomentumWheel. Definition at line 113 of file Device.cpp. References Device::c_bNotActive, and Device::SetActive(). Referenced by Device::~Device(), Relay::~Relay(), and Thruster::~Thruster(). |
|
|
Returns the physical location of the device with respect to whorl body coordinates.
Definition at line 75 of file Device.cpp. References O_SESSAME::Vector. |
|
|
Gets sensor location Definition at line 100 of file DMURateGyro.h. References DMU::GetLocation(), m_DMU, and O_SESSAME::Vector. |
|
|
Gets current measurement Implements Sensor. Definition at line 60 of file DMURateGyro.h. References DMU::GetAnalogReading(), DMU::GetDigitalReading(), m_channelID, m_DAQCard, m_DMU, and Measurement::SetTime(). Referenced by DMURateGyro(). |
|
|
Gets sensor mode (mainly for debugging purposes now) Definition at line 103 of file DMURateGyro.h. |
|
|
Gets sensor to body quaternion Implements AttitudeSensor. Definition at line 97 of file DMURateGyro.h. References DMU::GetSensorToBodyQuaternion(), m_channelID, m_DMU, and O_SESSAME::Vector. |
|
|
function which sets the pointer to the (one and only) instance of the DMU, as well as the (one and only) instance of the DAQCard if the rate gyro is set to analog mode in the config file Reimplemented from Device. Definition at line 47 of file DMURateGyro.h. References DAQCard::Instance(), DMU::Instance(), m_DAQCard, m_DMU, and m_mode. Referenced by DMURateGyro(). |
|
|
Returns the current state of m_bActiveState.
Definition at line 59 of file Device.cpp. Referenced by Device::Device(). |
|
|
Specify the physical location of the device with respect to whorl body coordinates.
Definition at line 67 of file Device.cpp. References Device::m_Location, and O_SESSAME::Vector. |
|
|
a constant bool that is equal to true. Used for setting the active state Definition at line 50 of file Device.h. Referenced by Device::Initialize(). |
|
|
a constant bool that is equal to false. Used for setting the active state. Definition at line 48 of file Device.h. Referenced by Device::Deinitialize(), and Device::Device(). |
|
|
channel of sensor in DMU Definition at line 110 of file DMURateGyro.h. Referenced by DMURateGyro(), GetMeasurement(), and GetSensorToBodyQuaternion(). |
|
|
pointer to instance of the DAQ card Definition at line 108 of file DMURateGyro.h. Referenced by GetMeasurement(), and Initialize(). |
|
|
pointer to the instance of the DMU physical device Definition at line 107 of file DMURateGyro.h. Referenced by GetLocation(), GetMeasurement(), GetSensorToBodyQuaternion(), and Initialize(). |
|
|
operating mode of sensor, either digital (1) or analog (2) Definition at line 111 of file DMURateGyro.h. Referenced by DMURateGyro(), and Initialize(). |
|
|
calibration offset value in units of V Definition at line 112 of file DMURateGyro.h. Referenced by DMURateGyro(). |
|
|
rate sensor scale factor in units of V/(deg/s) Definition at line 113 of file DMURateGyro.h. Referenced by DMURateGyro(). |
|
|
|
 1.3.9.1
1.3.9.1