#include <ExtendedKalmanFilter.h>
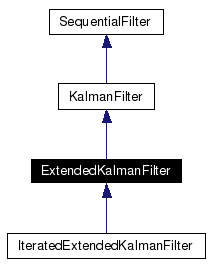
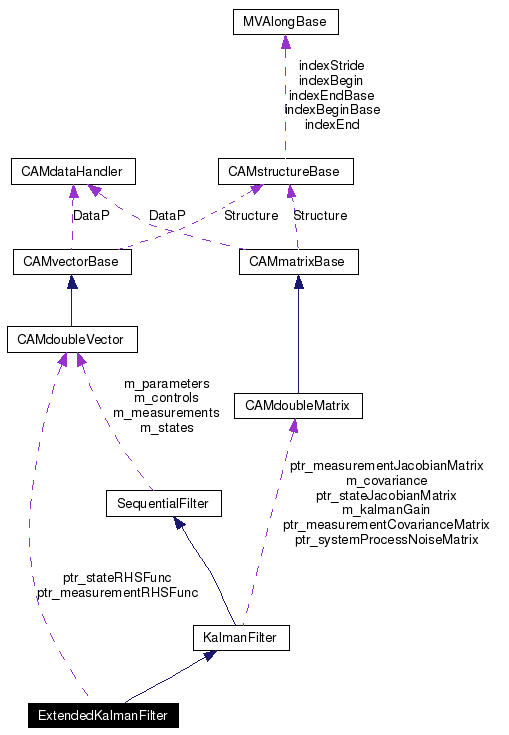
Inheritance diagram for ExtendedKalmanFilter:
|
|
|
|
Deconstructor Definition at line 52 of file ExtendedKalmanFilter.cpp. |
|
|
Executes the Kalman gain calculation function Definition at line 78 of file KalmanFilter.cpp. References KalmanFilter::ptr_kalmanGainCalculationFunc. Referenced by KalmanFilter::EstimateState(), IteratedExtendedKalmanFilter::EstimateState(), and EstimateState(). |
|
|
Estimate the state with current filter information Reimplemented from KalmanFilter. Reimplemented in IteratedExtendedKalmanFilter. Definition at line 59 of file ExtendedKalmanFilter.cpp. References KalmanFilter::CalculateKalmanGain(), KalmanFilter::MeasurementUpdateCovariance(), KalmanFilter::MeasurementUpdateState(), KalmanFilter::PropagateCovariance(), and PropagateState(). Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Gets the control vector. Definition at line 24 of file SequentialFilter.cpp. References O_SESSAME::Vector. Referenced by SequentialFilterHistory::AppendHistory(), SequentialFilterHistory::GetHistory(), LKFCovarianceMatrixPropagator(), LKFStateMeasurementUpdate(), LKFStatePropagator(), param_Euler_Ematrix(), and RungeKuttaSolve(). |
|
|
Gets the current state covairance matrix Implements SequentialFilter. Definition at line 56 of file KalmanFilter.cpp. References O_SESSAME::Matrix. Referenced by LKFCalcualteKalmanGain(), LKFCovarianceMatrixPropagator(), LKFCovarianceMeasurementUpdate(), and LKFStateMeasurementUpdate(). |
|
|
Gets the current estimated measurements Reimplemented from KalmanFilter. Definition at line 55 of file ExtendedKalmanFilter.cpp. References O_SESSAME::Vector. |
|
|
Gets the current Kalman gain matrix Implements SequentialFilter. Definition at line 57 of file KalmanFilter.cpp. References O_SESSAME::Matrix. Referenced by LKFCovarianceMatrixPropagator(), LKFCovarianceMeasurementUpdate(), and LKFStateMeasurementUpdate(). |
|
|
Gets the current measurement covairance matrix Definition at line 60 of file KalmanFilter.cpp. References O_SESSAME::Matrix. Referenced by LKFCalcualteKalmanGain(). |
|
|
Gets the current measurement Jacobian matrix Definition at line 62 of file KalmanFilter.cpp. References O_SESSAME::Matrix. Referenced by LKFCalcualteKalmanGain(), LKFCovarianceMeasurementUpdate(), and LKFStateMeasurementUpdate(). |
|
|
Gets the measurement vector. Definition at line 27 of file SequentialFilter.cpp. References O_SESSAME::Vector. Referenced by ab_Hmatrix(), ab_measurementRHSFunc(), SequentialFilterHistory::AppendHistory(), SequentialFilterHistory::GetHistory(), KalmanFilterHistory::GetKalmanHistory(), LKFCovarianceMatrixPropagator(), LKFStateMeasurementUpdate(), and LKFStatePropagator(). |
|
|
a bit of a hack. Reimplemented in IteratedExtendedKalmanFilter. Definition at line 78 of file SequentialFilter.h. Referenced by IteratedExtendedKalmanFilterHistory::AppendHistory(). |
|
|
Gets the paramter vector. Definition at line 30 of file SequentialFilter.cpp. References O_SESSAME::Vector. Referenced by ab_Fmatrix(), ab_Hmatrix(), ab_measurementRHSFunc(), SequentialFilterHistory::AppendHistory(), Att_Fmatrix(), Euler_Fmatrix(), SequentialFilterHistory::GetHistory(), LKFCovarianceMatrixPropagator(), LKFStateMeasurementUpdate(), LKFStatePropagator(), param_Euler_Ematrix(), RungeKuttaSolve(), and state_Euler_Fmatrix(). |
|
|
Gets the propagation step size Definition at line 62 of file ExtendedKalmanFilter.h. Referenced by main(), and RungeKuttaSolve(). |
|
||||||||||||||||||||
|
Gets the current 1st time derivative of the state Definition at line 59 of file ExtendedKalmanFilter.h. References O_SESSAME::Vector. Referenced by main(), param_Euler_Ematrix(), and RungeKuttaSolve(). |
|
|
Gets the current state Jacobian matrix Definition at line 61 of file KalmanFilter.cpp. References O_SESSAME::Matrix. Referenced by LKFCovarianceMatrixPropagator(), and LKFStatePropagator(). |
|
|
|
Gets the current system process noise matrix Definition at line 59 of file KalmanFilter.cpp. References O_SESSAME::Matrix. Referenced by LKFCovarianceMatrixPropagator(). |
|
|
Gets the time of the stored estimate. Definition at line 15 of file SequentialFilter.cpp. Referenced by param_Euler_Ematrix(), and RungeKuttaSolve(). |
|
|
Gets the time of the stored measurements. Definition at line 18 of file SequentialFilter.cpp. Referenced by RungeKuttaSolve(). |
|
|
Gets the time step between the last state estimate and the current measurements. Definition at line 60 of file SequentialFilter.h. Referenced by LKFCovarianceMatrixPropagator(), and LKFStatePropagator(). |
|
|
Executes the state covariance measurement update function Definition at line 80 of file KalmanFilter.cpp. References KalmanFilter::ptr_covarianceMeasurementUpdateFunc. Referenced by KalmanFilter::EstimateState(), IteratedExtendedKalmanFilter::EstimateState(), and EstimateState(). |
|
|
Executes the state measurement update function Definition at line 79 of file KalmanFilter.cpp. References KalmanFilter::ptr_stateMeasurementUpdateFunc. Referenced by KalmanFilter::EstimateState(), IteratedExtendedKalmanFilter::EstimateState(), and EstimateState(). |
|
|
Executes the state covariance propagation function Definition at line 77 of file KalmanFilter.cpp. References KalmanFilter::ptr_covariancePropagateFunc. Referenced by KalmanFilter::EstimateState(), IteratedExtendedKalmanFilter::EstimateState(), and EstimateState(). |
|
|
Executes the state propagation function Reimplemented from KalmanFilter. Definition at line 57 of file ExtendedKalmanFilter.cpp. References ptr_nonlinearStatePropagator. Referenced by IteratedExtendedKalmanFilter::EstimateState(), and EstimateState(). |
|
|
Sets the control vector, u. Definition at line 43 of file SequentialFilter.h. References O_SESSAME::Vector. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the state covariance matrix Definition at line 55 of file KalmanFilter.h. References KalmanFilter::m_covariance, and O_SESSAME::Matrix. Referenced by DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), KalmanFilter::KalmanFilter(), LKFCovarianceMatrixPropagator(), LKFCovarianceMeasurementUpdate(), and main(). |
|
|
Sets the pointer to the state covariance measurement update function Definition at line 73 of file KalmanFilter.h. References KalmanFilter::ptr_covarianceMeasurementUpdateFunc. Referenced by ExtendedKalmanFilter(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), and KalmanFilter::KalmanFilter(). |
|
|
Sets the pointer to the state covariance propagation function Definition at line 64 of file KalmanFilter.h. References KalmanFilter::ptr_covariancePropagateFunc. Referenced by ExtendedKalmanFilter(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), and KalmanFilter::KalmanFilter(). |
|
|
Sets the pointer to the Kalman gain calculation function Definition at line 67 of file KalmanFilter.h. References KalmanFilter::ptr_kalmanGainCalculationFunc. Referenced by ExtendedKalmanFilter(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), and KalmanFilter::KalmanFilter(). |
|
|
Sets the Kalman gain matrix Definition at line 58 of file KalmanFilter.h. References KalmanFilter::m_kalmanGain, and O_SESSAME::Matrix. Referenced by DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), KalmanFilter::KalmanFilter(), LKFCalcualteKalmanGain(), and main(). |
|
|
Sets the pointer to the measurement covariance matrix function Definition at line 79 of file KalmanFilter.h. References O_SESSAME::Matrix, and KalmanFilter::ptr_measurementCovarianceMatrix. Referenced by ExtendedKalmanFilter(), DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), KalmanFilter::KalmanFilter(), and main(). |
|
|
Sets the pointer to the measurement Jacobian matrix function Definition at line 85 of file KalmanFilter.h. References O_SESSAME::Matrix, and KalmanFilter::ptr_measurementJacobianMatrix. Referenced by ExtendedKalmanFilter(), DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), KalmanFilter::KalmanFilter(), and main(). |
|
|
Set the pointer to the measurment RHS function Definition at line 45 of file ExtendedKalmanFilter.h. References ptr_measurementRHSFunc, and O_SESSAME::Vector. Referenced by DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), and main(). |
|
|
Sets the measurement vector, z. Definition at line 46 of file SequentialFilter.h. References O_SESSAME::Vector. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the nonlinear state propagation Definition at line 51 of file ExtendedKalmanFilter.h. References ptr_nonlinearStatePropagator. Referenced by ExtendedKalmanFilter(), and IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(). |
|
|
Sets the parameter vector, w. Definition at line 49 of file SequentialFilter.h. References O_SESSAME::Vector. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the propagation step size Definition at line 48 of file ExtendedKalmanFilter.h. References m_propagationStepSize. Referenced by ExtendedKalmanFilter(), and IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(). |
|
|
Sets the pointer to the state Jacobian matrix function Definition at line 82 of file KalmanFilter.h. References O_SESSAME::Matrix, and KalmanFilter::ptr_stateJacobianMatrix. Referenced by ExtendedKalmanFilter(), DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), KalmanFilter::KalmanFilter(), and main(). |
|
|
Sets the pointer to the state measurement update function Definition at line 70 of file KalmanFilter.h. References KalmanFilter::ptr_stateMeasurementUpdateFunc. Referenced by ExtendedKalmanFilter(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), and KalmanFilter::KalmanFilter(). |
|
|
Sets the pointer to the state propagation function Definition at line 61 of file KalmanFilter.h. References KalmanFilter::ptr_statePropagteFunc. Referenced by KalmanFilter::KalmanFilter(). |
|
|
Sets the pointer to the state RHS function Definition at line 42 of file ExtendedKalmanFilter.h. References ptr_stateRHSFunc, and O_SESSAME::Vector. Referenced by DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), and main(). |
|
|
Sets the state vector, x. Definition at line 40 of file SequentialFilter.h. References O_SESSAME::Vector. Referenced by LKFStateMeasurementUpdate(), LKFStatePropagator(), main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the pointer to the system process noise matrix function Definition at line 76 of file KalmanFilter.h. References O_SESSAME::Matrix, and KalmanFilter::ptr_systemProcessNoiseMatrix. Referenced by ExtendedKalmanFilter(), DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), KalmanFilter::KalmanFilter(), and main(). |
|
|
Sets the time of the currently saved state estimate in seconds Definition at line 34 of file SequentialFilter.h. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the time when the measurements were taken, seconds Definition at line 37 of file SequentialFilter.h. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
The vector of controls applied at t(k), u. Definition at line 87 of file SequentialFilter.h. |
|
|
The covariance matrix, P. Definition at line 115 of file KalmanFilter.h. Referenced by KalmanFilter::SetCovarianceMatrix(). |
|
|
The Kalman Gain matrix, K. Definition at line 116 of file KalmanFilter.h. Referenced by KalmanFilter::SetKalmanGainMatrix(). |
|
|
The vector of measurements at t(k), z. Definition at line 88 of file SequentialFilter.h. |
|
|
The vector of system parameters, w. Definition at line 89 of file SequentialFilter.h. |
|
|
Definition at line 72 of file ExtendedKalmanFilter.h. Referenced by SetPropagationStepSize(). |
|
|
The vector of states; enters filter as Definition at line 86 of file SequentialFilter.h. |
|
|
Time of the current state estimate, seconds. Definition at line 84 of file SequentialFilter.h. |
|
|
Time when the measurements were taken, seconds. Definition at line 85 of file SequentialFilter.h. |
|
|
A function pointer to the measurement right-hand side file, Referenced by SetMeasurementRHS(). |
|
|
Referenced by PropagateState(), and SetNonlinearStatePropagator(). |
|
|
A function pointer to the (nonlinear) right-hand side function for the states, Referenced by SetStateRHS(). |
 1.3.9.1
1.3.9.1
 and is incrementally updated to
and is incrementally updated to  and finally
and finally  .
.
 .
.
 .
.