#include <KalmanFilter.h>
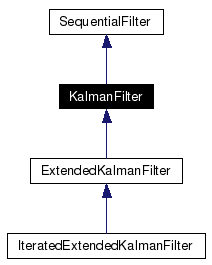
Inheritance diagram for KalmanFilter:
|
|
||||||||||||
|
|
Deconstructor Definition at line 53 of file KalmanFilter.cpp. |
|
|
Executes the Kalman gain calculation function Definition at line 78 of file KalmanFilter.cpp. References ptr_kalmanGainCalculationFunc. Referenced by EstimateState(), IteratedExtendedKalmanFilter::EstimateState(), and ExtendedKalmanFilter::EstimateState(). |
|
|
Estimate the state using the last state estimate and the current measurements Implements SequentialFilter. Reimplemented in ExtendedKalmanFilter, and IteratedExtendedKalmanFilter. Definition at line 64 of file KalmanFilter.cpp. References CalculateKalmanGain(), MeasurementUpdateCovariance(), MeasurementUpdateState(), PropagateCovariance(), and PropagateState(). Referenced by main(). |
|
|
Gets the control vector. Definition at line 24 of file SequentialFilter.cpp. References O_SESSAME::Vector. Referenced by SequentialFilterHistory::AppendHistory(), SequentialFilterHistory::GetHistory(), LKFCovarianceMatrixPropagator(), LKFStateMeasurementUpdate(), LKFStatePropagator(), param_Euler_Ematrix(), and RungeKuttaSolve(). |
|
|
Gets the current state covairance matrix Implements SequentialFilter. Definition at line 56 of file KalmanFilter.cpp. References O_SESSAME::Matrix. Referenced by LKFCalcualteKalmanGain(), LKFCovarianceMatrixPropagator(), LKFCovarianceMeasurementUpdate(), and LKFStateMeasurementUpdate(). |
|
|
Gets the current measurement Jacobian matrix Reimplemented in ExtendedKalmanFilter. Definition at line 111 of file KalmanFilter.h. References ptr_measurementJacobianMatrix, and O_SESSAME::Vector. Referenced by LKFStateMeasurementUpdate(). |
|
|
Gets the current Kalman gain matrix Implements SequentialFilter. Definition at line 57 of file KalmanFilter.cpp. References O_SESSAME::Matrix. Referenced by LKFCovarianceMatrixPropagator(), LKFCovarianceMeasurementUpdate(), and LKFStateMeasurementUpdate(). |
|
|
Gets the current measurement covairance matrix Definition at line 60 of file KalmanFilter.cpp. References O_SESSAME::Matrix. Referenced by LKFCalcualteKalmanGain(). |
|
|
Gets the current measurement Jacobian matrix Definition at line 62 of file KalmanFilter.cpp. References O_SESSAME::Matrix. Referenced by LKFCalcualteKalmanGain(), LKFCovarianceMeasurementUpdate(), and LKFStateMeasurementUpdate(). |
|
|
Gets the measurement vector. Definition at line 27 of file SequentialFilter.cpp. References O_SESSAME::Vector. Referenced by ab_Hmatrix(), ab_measurementRHSFunc(), SequentialFilterHistory::AppendHistory(), SequentialFilterHistory::GetHistory(), KalmanFilterHistory::GetKalmanHistory(), LKFCovarianceMatrixPropagator(), LKFStateMeasurementUpdate(), and LKFStatePropagator(). |
|
|
a bit of a hack. Reimplemented in IteratedExtendedKalmanFilter. Definition at line 78 of file SequentialFilter.h. Referenced by IteratedExtendedKalmanFilterHistory::AppendHistory(). |
|
|
Gets the paramter vector. Definition at line 30 of file SequentialFilter.cpp. References O_SESSAME::Vector. Referenced by ab_Fmatrix(), ab_Hmatrix(), ab_measurementRHSFunc(), SequentialFilterHistory::AppendHistory(), Att_Fmatrix(), Euler_Fmatrix(), SequentialFilterHistory::GetHistory(), LKFCovarianceMatrixPropagator(), LKFStateMeasurementUpdate(), LKFStatePropagator(), param_Euler_Ematrix(), RungeKuttaSolve(), and state_Euler_Fmatrix(). |
|
|
Gets the current state Jacobian matrix Definition at line 61 of file KalmanFilter.cpp. References O_SESSAME::Matrix. Referenced by LKFCovarianceMatrixPropagator(), and LKFStatePropagator(). |
|
|
|
Gets the current system process noise matrix Definition at line 59 of file KalmanFilter.cpp. References O_SESSAME::Matrix. Referenced by LKFCovarianceMatrixPropagator(). |
|
|
Gets the time of the stored estimate. Definition at line 15 of file SequentialFilter.cpp. Referenced by param_Euler_Ematrix(), and RungeKuttaSolve(). |
|
|
Gets the time of the stored measurements. Definition at line 18 of file SequentialFilter.cpp. Referenced by RungeKuttaSolve(). |
|
|
Gets the time step between the last state estimate and the current measurements. Definition at line 60 of file SequentialFilter.h. Referenced by LKFCovarianceMatrixPropagator(), and LKFStatePropagator(). |
|
|
Executes the state covariance measurement update function Definition at line 80 of file KalmanFilter.cpp. References ptr_covarianceMeasurementUpdateFunc. Referenced by EstimateState(), IteratedExtendedKalmanFilter::EstimateState(), and ExtendedKalmanFilter::EstimateState(). |
|
|
Executes the state measurement update function Definition at line 79 of file KalmanFilter.cpp. References ptr_stateMeasurementUpdateFunc. Referenced by EstimateState(), IteratedExtendedKalmanFilter::EstimateState(), and ExtendedKalmanFilter::EstimateState(). |
|
|
Executes the state covariance propagation function Definition at line 77 of file KalmanFilter.cpp. References ptr_covariancePropagateFunc. Referenced by EstimateState(), IteratedExtendedKalmanFilter::EstimateState(), and ExtendedKalmanFilter::EstimateState(). |
|
|
Executes the state propagation function Reimplemented in ExtendedKalmanFilter. Definition at line 76 of file KalmanFilter.cpp. References ptr_statePropagteFunc. Referenced by EstimateState(). |
|
|
Sets the control vector, u. Definition at line 43 of file SequentialFilter.h. References O_SESSAME::Vector. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the state covariance matrix Definition at line 55 of file KalmanFilter.h. References m_covariance, and O_SESSAME::Matrix. Referenced by DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), KalmanFilter(), LKFCovarianceMatrixPropagator(), LKFCovarianceMeasurementUpdate(), and main(). |
|
|
Sets the pointer to the state covariance measurement update function Definition at line 73 of file KalmanFilter.h. References ptr_covarianceMeasurementUpdateFunc. Referenced by ExtendedKalmanFilter::ExtendedKalmanFilter(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), and KalmanFilter(). |
|
|
Sets the pointer to the state covariance propagation function Definition at line 64 of file KalmanFilter.h. References ptr_covariancePropagateFunc. Referenced by ExtendedKalmanFilter::ExtendedKalmanFilter(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), and KalmanFilter(). |
|
|
Sets the pointer to the Kalman gain calculation function Definition at line 67 of file KalmanFilter.h. References ptr_kalmanGainCalculationFunc. Referenced by ExtendedKalmanFilter::ExtendedKalmanFilter(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), and KalmanFilter(). |
|
|
Sets the Kalman gain matrix Definition at line 58 of file KalmanFilter.h. References m_kalmanGain, and O_SESSAME::Matrix. Referenced by DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), KalmanFilter(), LKFCalcualteKalmanGain(), and main(). |
|
|
Sets the pointer to the measurement covariance matrix function Definition at line 79 of file KalmanFilter.h. References O_SESSAME::Matrix, and ptr_measurementCovarianceMatrix. Referenced by ExtendedKalmanFilter::ExtendedKalmanFilter(), DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), KalmanFilter(), and main(). |
|
|
Sets the pointer to the measurement Jacobian matrix function Definition at line 85 of file KalmanFilter.h. References O_SESSAME::Matrix, and ptr_measurementJacobianMatrix. Referenced by ExtendedKalmanFilter::ExtendedKalmanFilter(), DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), KalmanFilter(), and main(). |
|
|
Sets the measurement vector, z. Definition at line 46 of file SequentialFilter.h. References O_SESSAME::Vector. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the parameter vector, w. Definition at line 49 of file SequentialFilter.h. References O_SESSAME::Vector. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the pointer to the state Jacobian matrix function Definition at line 82 of file KalmanFilter.h. References O_SESSAME::Matrix, and ptr_stateJacobianMatrix. Referenced by ExtendedKalmanFilter::ExtendedKalmanFilter(), DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), KalmanFilter(), and main(). |
|
|
Sets the pointer to the state measurement update function Definition at line 70 of file KalmanFilter.h. References ptr_stateMeasurementUpdateFunc. Referenced by ExtendedKalmanFilter::ExtendedKalmanFilter(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), and KalmanFilter(). |
|
|
Sets the pointer to the state propagation function Definition at line 61 of file KalmanFilter.h. References ptr_statePropagteFunc. Referenced by KalmanFilter(). |
|
|
Sets the state vector, x. Definition at line 40 of file SequentialFilter.h. References O_SESSAME::Vector. Referenced by LKFStateMeasurementUpdate(), LKFStatePropagator(), main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the pointer to the system process noise matrix function Definition at line 76 of file KalmanFilter.h. References O_SESSAME::Matrix, and ptr_systemProcessNoiseMatrix. Referenced by ExtendedKalmanFilter::ExtendedKalmanFilter(), DefaultObserver::Initialize(), AttitudeObserver::Initialize(), atterrbiasObserver::Initialize(), IteratedExtendedKalmanFilter::IteratedExtendedKalmanFilter(), KalmanFilter(), and main(). |
|
|
Sets the time of the currently saved state estimate in seconds Definition at line 34 of file SequentialFilter.h. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the time when the measurements were taken, seconds Definition at line 37 of file SequentialFilter.h. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
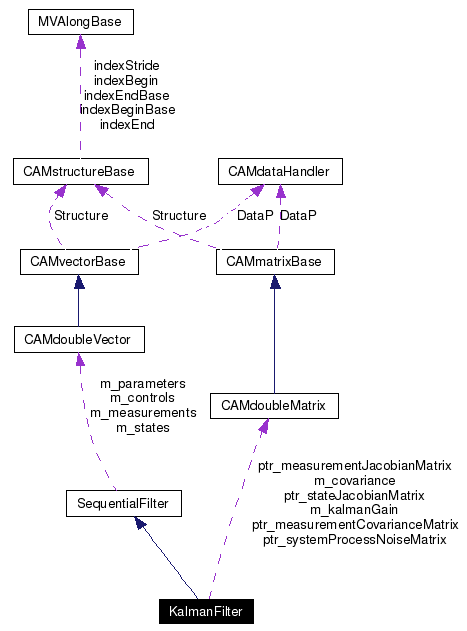
The vector of controls applied at t(k), u. Definition at line 87 of file SequentialFilter.h. |
|
|
The covariance matrix, P. Definition at line 115 of file KalmanFilter.h. Referenced by SetCovarianceMatrix(). |
|
|
The Kalman Gain matrix, K. Definition at line 116 of file KalmanFilter.h. Referenced by SetKalmanGainMatrix(). |
|
|
The vector of measurements at t(k), z. Definition at line 88 of file SequentialFilter.h. |
|
|
The vector of system parameters, w. Definition at line 89 of file SequentialFilter.h. |
|
|
The vector of states; enters filter as Definition at line 86 of file SequentialFilter.h. |
|
|
Time of the current state estimate, seconds. Definition at line 84 of file SequentialFilter.h. |
|
|
Time when the measurements were taken, seconds. Definition at line 85 of file SequentialFilter.h. |
|
|
A function pointer to the state covariance measurement update function Referenced by MeasurementUpdateCovariance(), and SetCovarianceMeasurementUpdate(). |
|
|
A function pointer to the state covariance propagation function Referenced by PropagateCovariance(), and SetCovariancePropagator(). |
|
|
A function pointer to the Kalman gain calculation function Referenced by CalculateKalmanGain(), and SetKalmanGainCalculation(). |
|
|
A function pointer to the measurement covariance matrix, R. Referenced by SetMeasurementCovarianceMatrix(). |
|
|
A function pointer to the measurement jacobian matrix, H. Referenced by GetEstimatedMeasurements(), and SetMeasurementJacobianMatrix(). |
|
|
A function pointer to the state jacobian matrix, F. Referenced by SetStateJacobianMatrix(). |
|
|
A function pointer to the state measurement update function Referenced by MeasurementUpdateState(), and SetStateMeasurementUpdate(). |
|
|
A function pointer to the state propagation function Referenced by PropagateState(), and SetStatePropagator(). |
|
|
A function pointer to the system process noise matrix,Q. Referenced by SetSystemProcessNoiseMatrix(). |
 1.3.9.1
1.3.9.1
 and is incrementally updated to
and is incrementally updated to  and finally
and finally  .
.