#include <SequentialFilter.h>
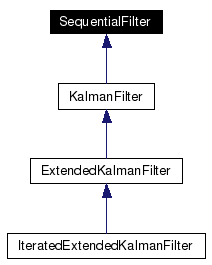
Inheritance diagram for SequentialFilter:
Public Member Functions | |
| virtual | ~SequentialFilter () |
| void | SetTimeOfEstimate (double &_timeOfEstimate) |
| void | SetTimeOfMeasurements (double &_timeOfMeasurements) |
| void | SetStateVector (Vector &_states) |
| void | SetControlVector (Vector &_controls) |
| void | SetMeasurementVector (Vector &_measurements) |
| void | SetParameterVector (Vector &_parameters) |
| double | GetTimeOfEstimate () |
| double | GetTimeOfMeasurements () |
| double | GetTimeStep () |
| Vector | GetStateVector () |
| Vector | GetControlVector () |
| Vector | GetMeasurementVector () |
| Vector | GetParameterVector () |
| virtual void | EstimateState ()=0 |
| virtual Matrix | GetCovarianceMatrix ()=0 |
| virtual Matrix | GetKalmanGainMatrix ()=0 |
| virtual int | GetNumIterations () |
Protected Attributes | |
| double | m_timeOfEstimate |
| double | m_timeOfMeasurements |
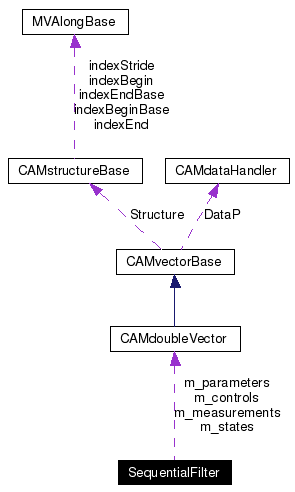
| Vector | m_states |
| Vector | m_controls |
| Vector | m_measurements |
| Vector | m_parameters |
|
|
Default destructor Definition at line 27 of file SequentialFilter.h. |
|
|
Pure virtual functions for compatibility with derived classes. Implemented in ExtendedKalmanFilter, IteratedExtendedKalmanFilter, and KalmanFilter. |
|
|
Gets the control vector. Definition at line 24 of file SequentialFilter.cpp. References O_SESSAME::Vector. Referenced by SequentialFilterHistory::AppendHistory(), SequentialFilterHistory::GetHistory(), LKFCovarianceMatrixPropagator(), LKFStateMeasurementUpdate(), LKFStatePropagator(), param_Euler_Ematrix(), and RungeKuttaSolve(). |
|
|
Implemented in KalmanFilter. Referenced by KalmanFilterHistory::AppendHistory(). |
|
|
Implemented in KalmanFilter. Referenced by KalmanFilterHistory::AppendHistory(). |
|
|
Gets the measurement vector. Definition at line 27 of file SequentialFilter.cpp. References O_SESSAME::Vector. Referenced by ab_Hmatrix(), ab_measurementRHSFunc(), SequentialFilterHistory::AppendHistory(), SequentialFilterHistory::GetHistory(), KalmanFilterHistory::GetKalmanHistory(), LKFCovarianceMatrixPropagator(), LKFStateMeasurementUpdate(), and LKFStatePropagator(). |
|
|
a bit of a hack. Reimplemented in IteratedExtendedKalmanFilter. Definition at line 78 of file SequentialFilter.h. Referenced by IteratedExtendedKalmanFilterHistory::AppendHistory(). |
|
|
Gets the paramter vector. Definition at line 30 of file SequentialFilter.cpp. References O_SESSAME::Vector. Referenced by ab_Fmatrix(), ab_Hmatrix(), ab_measurementRHSFunc(), SequentialFilterHistory::AppendHistory(), Att_Fmatrix(), Euler_Fmatrix(), SequentialFilterHistory::GetHistory(), LKFCovarianceMatrixPropagator(), LKFStateMeasurementUpdate(), LKFStatePropagator(), param_Euler_Ematrix(), RungeKuttaSolve(), and state_Euler_Fmatrix(). |
|
|
|
Gets the time of the stored estimate. Definition at line 15 of file SequentialFilter.cpp. Referenced by param_Euler_Ematrix(), and RungeKuttaSolve(). |
|
|
Gets the time of the stored measurements. Definition at line 18 of file SequentialFilter.cpp. Referenced by RungeKuttaSolve(). |
|
|
Gets the time step between the last state estimate and the current measurements. Definition at line 60 of file SequentialFilter.h. Referenced by LKFCovarianceMatrixPropagator(), and LKFStatePropagator(). |
|
|
Sets the control vector, u. Definition at line 43 of file SequentialFilter.h. References O_SESSAME::Vector. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the measurement vector, z. Definition at line 46 of file SequentialFilter.h. References O_SESSAME::Vector. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the parameter vector, w. Definition at line 49 of file SequentialFilter.h. References O_SESSAME::Vector. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the state vector, x. Definition at line 40 of file SequentialFilter.h. References O_SESSAME::Vector. Referenced by LKFStateMeasurementUpdate(), LKFStatePropagator(), main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the time of the currently saved state estimate in seconds Definition at line 34 of file SequentialFilter.h. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
Sets the time when the measurements were taken, seconds Definition at line 37 of file SequentialFilter.h. Referenced by main(), DefaultObserver::Run(), AttitudeObserver::Run(), and atterrbiasObserver::Run(). |
|
|
The vector of controls applied at t(k), u. Definition at line 87 of file SequentialFilter.h. |
|
|
The vector of measurements at t(k), z. Definition at line 88 of file SequentialFilter.h. |
|
|
The vector of system parameters, w. Definition at line 89 of file SequentialFilter.h. |
|
|
The vector of states; enters filter as Definition at line 86 of file SequentialFilter.h. |
|
|
Time of the current state estimate, seconds. Definition at line 84 of file SequentialFilter.h. |
|
|
Time when the measurements were taken, seconds. Definition at line 85 of file SequentialFilter.h. |
 1.3.9.1
1.3.9.1
 and is incrementally updated to
and is incrementally updated to  and finally
and finally  .
.