Reference cammva documentation
Definition in file Matrix.h.
#include <iostream>
#include "cammva.h"
#include <math.h>
Include dependency graph for Matrix.h:
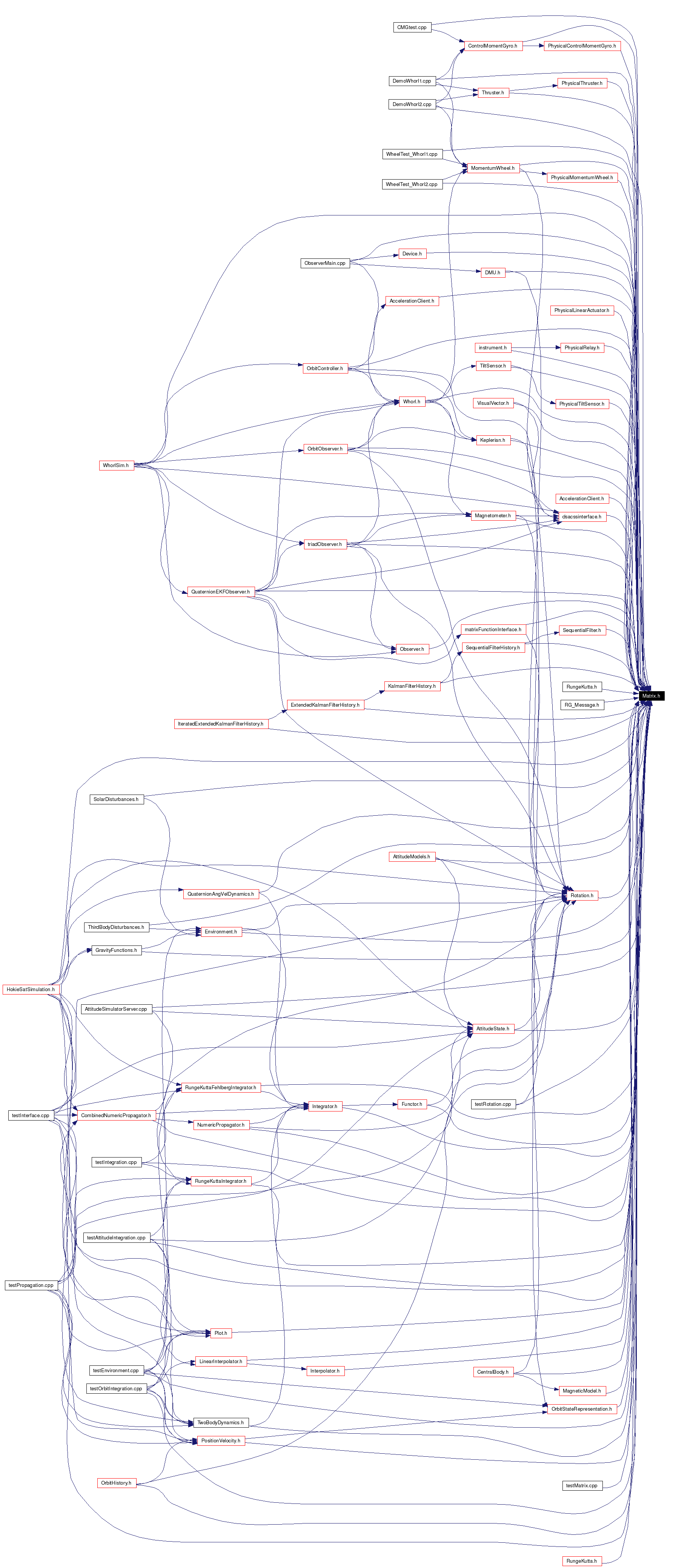
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | O_SESSAME |
Typedefs | |
| typedef CAMdoubleMatrix | Matrix |
| typedef CAMdoubleVector | Vector |
Functions | |
| Vector | Vabs (Vector _vector) |
| Returns the absolute value of a vector. | |
| Matrix | eye (int _rowColumns) |
| Creates an square identity matrix of specified size. | |
| double | trace (const Matrix &_inMatrix) |
| Calculates the trace of matrix (sum of elements along diagonal). | |
| double | norm2 (const Vector &_inVector) |
| Calculates the 2-norm of the vector (square-root of the sum of the squares). | |
| void | normalize (Vector &_inVector) |
| Normalizes a vector. | |
| double | normInf (const Vector &_inVector) |
| Calculates the Infinity-norm of the vector (largest value of the components). | |
| Matrix | skew (const Vector &_inVector) |
| Calculates the skew-symmetric matrix of a vector. | |
| Vector | crossP (const Vector &_v1, const Vector &_v2) |
| Calculates the cross product of 2 vectors. | |
Variables | |
| const int | MatrixIndexBase = 1 |
| const int | VectorIndexBase = 1 |
| const int | MatrixRowsIndex = 1 |
| const int | MatrixColsIndex = 2 |
|
|
|
||||||||||||
|
Calculates the cross product of 2 vectors. Equation: /f$ v_3 = v_1 v_2 = v_1/f$
Definition at line 149 of file Matrix.h. References O_SESSAME::skew(), and O_SESSAME::Vector. Referenced by OrbitController::cals(), triadObserver::GetAttitude(), O_SESSAME::ModifiedRodriguezParameters::operator+(), O_SESSAME::ModifiedRodriguezParameters::operator-(), and O_SESSAME::Keplerian::SetPositionVelocity(). |
|
|
Creates an square identity matrix of specified size.
Definition at line 56 of file Matrix.h. References O_SESSAME::Matrix, and CAMmatrixBase::setToValue(). Referenced by ab_Fmatrix(), ab_Hmatrix(), ab_Qmatrix(), ab_Rmatrix(), ab_stateRHSFunc(), AttituteDynamics(), ChangeAttitude(), ControlTorques(), O_SESSAME::DirectionCosineMatrix::DirectionCosineMatrix(), OrbitFrameIJK::GetRotation2IJK(), OrbitFrameIJK::GetRotationFromIJK(), atterrbiasObserver::Initialize(), LKFCovarianceMatrixPropagator(), LKFCovarianceMeasurementUpdate(), LKFStatePropagator(), main(), AttitudeModels::MRPKinematic(), otimes(), qdot(), QuaternionKinematics(), slidingModeControlMRPMW::Run(), O_SESSAME::DirectionCosineMatrix::Set(), SetupAttitude(), QuaternionEKFObserver::SingleMeasurement(), state_Euler_Hmatrix(), state_Euler_Qmatrix(), and state_Euler_Rmatrix(). |
|
|
|
Normalizes a vector.
Definition at line 94 of file Matrix.h. References O_SESSAME::norm2(). Referenced by triadObserver::GetAttitude(), O_SESSAME::Quaternion::Normalize(), triadObserver::Parse(), QuaternionEKFObserver::Parse(), and QuaternionEKFObserver::StateCovarianceUpdate(). |
|
|
Calculates the Infinity-norm of the vector (largest value of the components).
Definition at line 105 of file Matrix.h. References CAMvectorBase::maxAbs(). Referenced by O_SESSAME::Quaternion::Set(). |
|
|
Calculates the skew-symmetric matrix of a vector. Equation: /f[ {v^{}} = {bmatrix} 0 & -v_3 & v_2\ v_3 & 0 & -v_1\ -v_2 & v_1 & 0 {bmatrix} /f]
Definition at line 124 of file Matrix.h. References O_SESSAME::Matrix, O_SESSAME::MatrixIndexBase, CAMmatrixBase::setToValue(), and O_SESSAME::VectorIndexBase. Referenced by ab_Fmatrix(), ab_Hmatrix(), ab_measurementRHSFunc(), ab_stateRHSFunc(), Observer::AccelerationCorrection(), Att_Fmatrix(), Att_stateRHSFunc(), AttituteDynamics(), AttituteDynamics_QuaternionAngVel(), ControlTorques(), O_SESSAME::crossP(), Euler_Fmatrix(), Euler_stateRHSFunc(), O_SESSAME::OrbitState::GetOrbitAngularMomentum(), GravityGradientTorque(), QuaternionEKFObserver::MeasurementUpdate(), AttitudeModels::MRPKinematic(), otimes(), qdot(), QuaternionDynamics(), AttitudeModels::QuaternionKinematic(), QuaternionKinematics(), slidingModeControlMRPMW::Run(), SingleAxisController::Run(), MWCMGController::Run(), MRPTracking::Run(), DefaultController::Run(), AngularRateController::Run(), QuaternionEKFObserver::SingleMeasurement(), state_Euler_Fmatrix(), state_Euler_stateRHSFunc(), QuaternionEKFObserver::StateCovarianceUpdate(), and QuaternionEKFObserver::StateTransitionMatrix(). |
|
|
Calculates the trace of matrix (sum of elements along diagonal).
Definition at line 69 of file Matrix.h. Referenced by O_SESSAME::DirectionCosineMatrix::GetEulerAxisAngle(), and O_SESSAME::Quaternion::Set(). |
|
|
Returns the absolute value of a vector.
Definition at line 34 of file Matrix.h. References CAMvectorBase::getIndexCount(), and O_SESSAME::Vector. Referenced by slidingModeControlMRPMW::Run(). |
|
|
< Value referring to the "columns" index Definition at line 27 of file Matrix.h. Referenced by O_SESSAME::LinearInterpolator::LinearInterpolator(), myOrbitStateConvFunc(), PositionVelocityConvFunc(), O_SESSAME::CombinedNumericPropagator::PropagateAttitude(), and O_SESSAME::CombinedNumericPropagator::PropagateOrbit(). |
|
|
< Beginning index of Matrix class Definition at line 24 of file Matrix.h. Referenced by O_SESSAME::Plot::AddPlot(), AttituteDynamics(), O_SESSAME::DirectionCosineMatrix::GetEulerAxisAngle(), SequentialFilterHistory::GetHistory(), O_SESSAME::OrbitHistory::GetHistory(), O_SESSAME::History::GetHistory(), O_SESSAME::AttitudeHistory::GetHistory(), IteratedExtendedKalmanFilterHistory::GetIterationHistory(), KalmanFilterHistory::GetKalmanHistory(), O_SESSAME::RungeKuttaIntegrator::Integrate(), main(), myOrbitStateConvFunc(), O_SESSAME::DirectionCosineMatrix::Normalize(), O_SESSAME::Quaternion::operator+(), O_SESSAME::Quaternion::operator-(), Plot(), O_SESSAME::Plot2D(), PositionVelocityConvFunc(), O_SESSAME::CombinedNumericPropagator::PropagateAttitude(), O_SESSAME::CombinedNumericPropagator::PropagateOrbit(), QuaternionDynamics(), QuaternionKinematics(), O_SESSAME::R1(), O_SESSAME::R2(), O_SESSAME::R3(), O_SESSAME::Quaternion::Set(), O_SESSAME::DirectionCosineMatrix::Set(), and O_SESSAME::skew(). |
|
|
< Value referring to the "rows" index |
|
|
< Beginning index of Vector class Definition at line 25 of file Matrix.h. Referenced by AttituteDynamics(), AttituteDynamics_QuaternionAngVel(), ChangeOrbit(), DragForceFunction(), O_SESSAME::Quaternion::GetEulerAxisAngle(), O_SESSAME::DirectionCosineMatrix::GetEulerAxisAngle(), O_SESSAME::Keplerian::GetPositionVelocity(), O_SESSAME::Keplerian::GetPositionVelocityPQW(), O_SESSAME::Rotation::GetRotation(), O_SESSAME::PositionVelocity::GetState(), O_SESSAME::AttitudeState::GetState(), GravityForceFunction(), Whorl::Initialize(), O_SESSAME::LinearInterpolator::Interpolate(), main(), O_SESSAME::OsculatingOrbitalElements::Mapping(), O_SESSAME::Quaternion::operator+(), O_SESSAME::Quaternion::operator-(), OrbitForcesFunctor(), OrbitForcesWithDragFunctor(), O_SESSAME::Quaternion::Quaternion(), QuaternionKinematics(), O_SESSAME::Quaternion::Set(), O_SESSAME::ModifiedRodriguezParameters::Set(), O_SESSAME::DirectionCosineMatrix::Set(), O_SESSAME::Keplerian::SetKeplerianRepresentationEccentricAnomaly(), O_SESSAME::Keplerian::SetKeplerianRepresentationMeanAnomaly(), O_SESSAME::Keplerian::SetPositionVelocity(), O_SESSAME::PositionVelocity::SetState(), SetupOrbit(), O_SESSAME::skew(), ThirdBodyForceDisturbance(), and TwoBodyDynamics(). |
 1.3.9.1
1.3.9.1