Definition in file AttitudeObserver.cpp.
#include "AttitudeObserver.h"
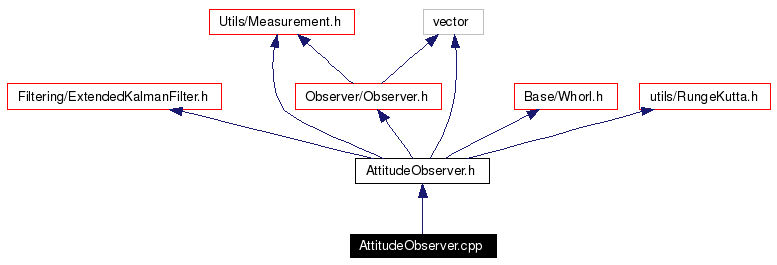
Include dependency graph for AttitudeObserver.cpp:
Go to the source code of this file.
Functions | |
| Matrix | Att_Fmatrix (KalmanFilter *ekf) |
| Matrix | Att_Hmatrix (KalmanFilter *kf) |
| Matrix | Att_Qmatrix (KalmanFilter *kf) |
| Matrix | Att_Rmatrix (KalmanFilter *kf) |
| Vector | Att_stateRHSFunc (double t, Vector initialState, Vector controls, Vector params) |
| Vector | Att_measurementRHSFunc (ExtendedKalmanFilter *ekf) |
| Vector | qdot (double time, Vector state, Vector controls, Vector params) |
|
|
Definition at line 129 of file AttitudeObserver.cpp. References SequentialFilter::GetParameterVector(), SequentialFilter::GetStateVector(), O_SESSAME::Matrix, O_SESSAME::skew(), and O_SESSAME::Vector. Referenced by AttitudeObserver::Initialize(). |
|
|
Definition at line 148 of file AttitudeObserver.cpp. References O_SESSAME::Matrix. Referenced by AttitudeObserver::Initialize(). |
|
|
Definition at line 199 of file AttitudeObserver.cpp. References SequentialFilter::GetStateVector(), and O_SESSAME::Vector. Referenced by AttitudeObserver::Initialize(). |
|
|
Definition at line 160 of file AttitudeObserver.cpp. References O_SESSAME::Matrix. Referenced by AttitudeObserver::Initialize(). |
|
|
Definition at line 172 of file AttitudeObserver.cpp. References O_SESSAME::Matrix. Referenced by AttitudeObserver::Initialize(). |
|
||||||||||||||||||||
|
Definition at line 185 of file AttitudeObserver.cpp. References O_SESSAME::Matrix, O_SESSAME::skew(), and O_SESSAME::Vector. Referenced by AttitudeObserver::Initialize(). |
|
||||||||||||||||||||
|
Definition at line 117 of file AttitudeObserver.cpp. References _, O_SESSAME::eye(), O_SESSAME::Matrix, O_SESSAME::skew(), and O_SESSAME::Vector. |
 1.3.9.1
1.3.9.1