Definition in file testPropagation.cpp.
#include "Matrix.h"
#include "Rotation.h"
#include "Attitude.h"
#include "Orbit.h"
#include "CombinedNumericPropagator.h"
#include "RungeKuttaIntegrator.h"
#include "orbitmodels/TwoBodyDynamics.h"
#include "EarthCentralBody.h"
#include "OrbitState.h"
#include "AttitudeState.h"
#include "orbitstaterep/PositionVelocity.h"
#include "orbitframes/OrbitFrameIJK.h"
#include "Plot.h"
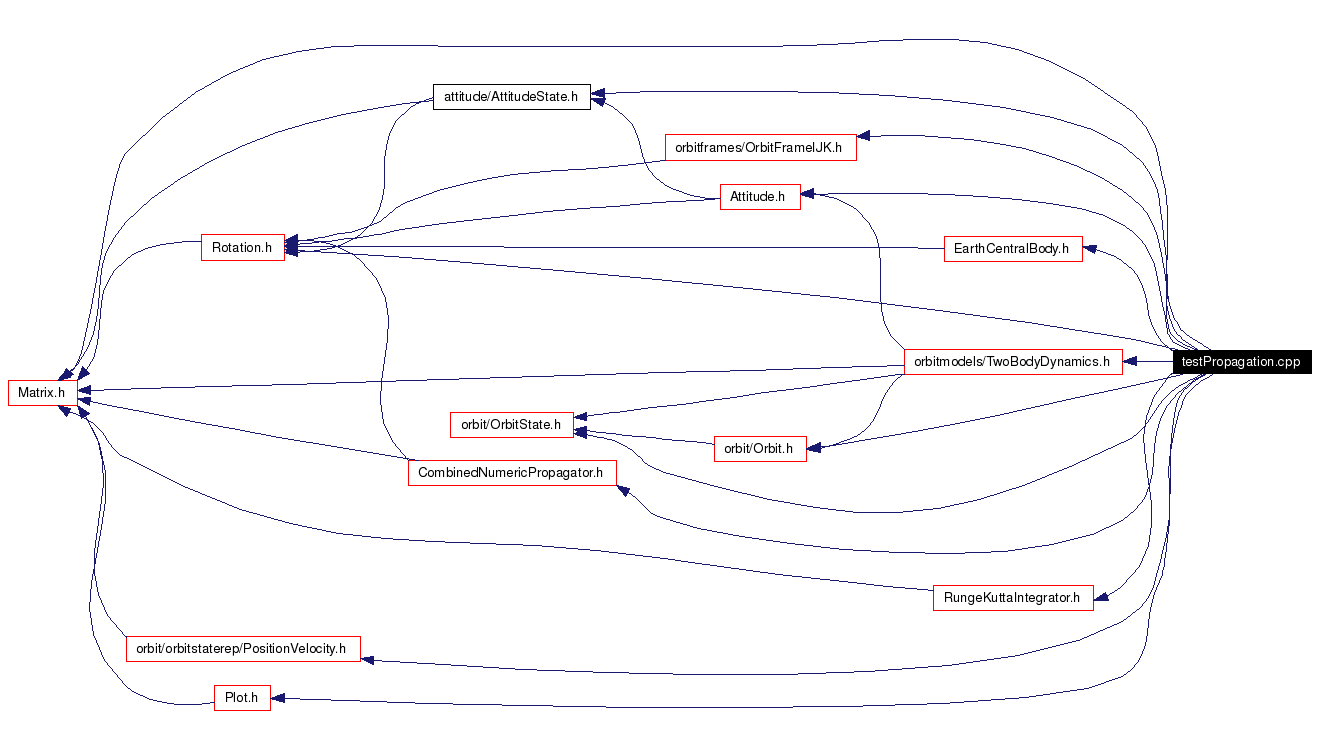
Include dependency graph for testPropagation.cpp:
Go to the source code of this file.
Functions | |
| NumericPropagator * | SetupPropagator () |
| Sets up a combined numeric propagator, RK4(5) integrator and tolerances. | |
| Environment * | SetupEnvironment () |
| Orbit * | SetupOrbit () |
| Creates an initial orbit read in from a file. | |
| Attitude * | SetupAttitude () |
| Creates an initial attitude read in from a file. | |
| void | myOrbitStateConvFunc (const Matrix &_meshPoint, OrbitState &_convertedOrbitState) |
| void | myAttitudeStateConvFunc (const Matrix &_meshPoint, AttitudeState &_convertedAttitudeState) |
| int | main () |
| Vector | GravityForceFunction (const ssfTime &_currentTime, const OrbitState &_currentOrbitState, const AttitudeState &_currentAttitudeState, const EnvFuncParamaterType &_parameterList) |
| Vector | DragForceFunction (const ssfTime &_currentTime, const OrbitState &_currentOrbitState, const AttitudeState &_currentAttitudeState, const EnvFuncParamaterType &_parameterList) |
| Vector | AttituteDynamics (const ssfTime &_time, const Vector &_integratingState, Orbit *_Orbit, Attitude *_Attitude, const Matrix &_parameters, const Functor &_forceFunctorPtr) |
|
||||||||||||||||||||||||||||
|
||||||||||||||||||||
|
Definition at line 118 of file testPropagation.cpp. References _, O_SESSAME::OrbitState::GetState(), O_SESSAME::norm2(), O_SESSAME::Vector, and O_SESSAME::VectorIndexBase. |
|
||||||||||||||||||||
|
Definition at line 108 of file testPropagation.cpp. References _, O_SESSAME::OrbitState::GetState(), O_SESSAME::norm2(), O_SESSAME::Vector, and O_SESSAME::VectorIndexBase. |
|
|
||||||||||||
|
|
|
||||||||||||
|
|
|
|
Creates an initial attitude read in from a file.
Definition at line 188 of file HokieSatSimulation.cpp. References _, O_SESSAME::eye(), CAMmatrixBase::inverse(), O_SESSAME::Matrix, O_SESSAME::AttitudeState::SetAngularVelocity(), O_SESSAME::Attitude::SetDynamicsEq(), O_SESSAME::Attitude::SetParameters(), O_SESSAME::AttitudeState::SetRotation(), O_SESSAME::Attitude::SetStateConversion(), O_SESSAME::Attitude::SetStateObject(), and O_SESSAME::Vector. Referenced by main(). |
|
|
|
|
|
Creates an initial orbit read in from a file.
Definition at line 159 of file HokieSatSimulation.cpp. References O_SESSAME::Orbit::SetDynamicsEq(), O_SESSAME::OrbitState::SetOrbitFrame(), O_SESSAME::OrbitState::SetState(), O_SESSAME::Orbit::SetStateConversion(), O_SESSAME::Orbit::SetStateObject(), O_SESSAME::OrbitState::SetStateRepresentation(), O_SESSAME::Vector, and O_SESSAME::VectorIndexBase. Referenced by main(). |
|
|
Sets up a combined numeric propagator, RK4(5) integrator and tolerances.
Definition at line 137 of file HokieSatSimulation.cpp. References O_SESSAME::CombinedNumericPropagator::SetAttitudeIntegrator(), O_SESSAME::CombinedNumericPropagator::SetOrbitIntegrator(), O_SESSAME::RungeKuttaFehlbergIntegrator::SetStepSizes(), and O_SESSAME::RungeKuttaFehlbergIntegrator::SetTolerance(). Referenced by main(). |
 1.3.9.1
1.3.9.1