#include <AttitudeState.h>
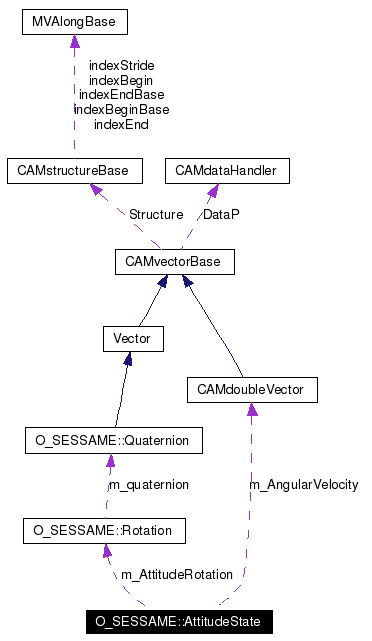
Collaboration diagram for O_SESSAME::AttitudeState:
Public Member Functions | |
| AttitudeState () | |
| Default Constructor. | |
| virtual | ~AttitudeState () |
| Default Deconstructor. | |
| AttitudeState (const Rotation &_Rot, AttitudeFrame *_pAttFrame=NULL) | |
| Creates an attitude state given a rotation and attitude frame (defaults to no frame). | |
| AttitudeState (const Rotation &_Rot, const Vector &_AngVel, AttitudeFrame *_pAttFrame=NULL) | |
| Creates an attitude state given a rotation, an angular velocity and attitude frame (defaults to no frame). | |
| void | SetAttitudeFrame (AttitudeFrame *_pNewAttitudeFrame) |
| Set the reference frame of the stored attitude. Will convert the old rotation to the new attitude frame if one was specified. | |
| AttitudeFrame * | GetAttitudeFrame () const |
| Returns a pointer to the attitude reference frame. | |
| void | SetState (const Rotation &_Rotation, const Vector &_AngVel, AttitudeFrame *_attFrame=NULL) |
| Set the attitude state given a rotation, an angular velocity and attitude frame (defaults to no frame). | |
| Vector | GetState (const RotationType &_rotType=Quaternion_Type, AttitudeFrame *_attFrame=NULL, const int &_Sequence=123) const |
| Return the attitude state rotation in vector format. | |
| void | SetRotation (const Rotation &_Rot) |
| Set the stored rotation. | |
| void | SetRotation (const Rotation &_Rot, AttitudeFrame *_pAttFrame) |
| Set the stored rotation and corresponding reference frame. | |
| Rotation | GetRotation () const |
| Returns the current rotation of the attitude state. | |
| void | SetAngularVelocity (const Vector &_angVel) |
| Set the stored angular velocity state. | |
| Vector | GetAngularVelocity () const |
| Returns the stored angular velocity state. | |
| Rotation | GetRotation2Orbital (const OrbitState &_orbState) const |
| Calculates the rotation from the current attitude state to the specified orbit reference frame. | |
Private Attributes | |
| Rotation | m_AttitudeRotation |
| Vector | m_AngularVelocity |
| AttitudeFrame * | m_pAttitudeFrame |
|
|
Default Constructor.
Definition at line 17 of file AttitudeState.cpp. |
|
|
Default Deconstructor.
Definition at line 21 of file AttitudeState.cpp. |
|
||||||||||||
|
Creates an attitude state given a rotation and attitude frame (defaults to no frame).
Definition at line 28 of file AttitudeState.cpp. References SetAttitudeFrame(), and SetRotation(). |
|
||||||||||||||||
|
Creates an attitude state given a rotation, an angular velocity and attitude frame (defaults to no frame).
Definition at line 34 of file AttitudeState.cpp. References SetAngularVelocity(), SetAttitudeFrame(), SetRotation(), and O_SESSAME::Vector. |
|
|
Returns the stored angular velocity state.
Definition at line 91 of file AttitudeState.cpp. References O_SESSAME::Vector. |
|
|
Returns a pointer to the attitude reference frame.
Definition at line 46 of file AttitudeState.cpp. References O_SESSAME::AttitudeFrame. |
|
|
Returns the current rotation of the attitude state.
Definition at line 62 of file AttitudeState.cpp. Referenced by GetRotation2Orbital(), and GetState(). |
|
|
Calculates the rotation from the current attitude state to the specified orbit reference frame.
Definition at line 96 of file AttitudeState.cpp. References O_SESSAME::Keplerian::GetArgPerigee(), O_SESSAME::Keplerian::GetInclination(), O_SESSAME::Keplerian::GetLongAscNode(), O_SESSAME::OrbitStateRepresentation::GetPositionVelocity(), GetRotation(), O_SESSAME::OrbitState::GetStateRepresentation(), O_SESSAME::R1(), O_SESSAME::R3(), and O_SESSAME::Keplerian::SetPositionVelocity(). Referenced by GravityGradientTorque(). |
|
||||||||||||||||
|
Return the attitude state rotation in vector format.
Definition at line 77 of file AttitudeState.cpp. References _, CAMvectorBase::getIndexBound(), O_SESSAME::Rotation::GetRotation(), GetRotation(), m_AngularVelocity, O_SESSAME::Vector, and O_SESSAME::VectorIndexBase. Referenced by AttitudeServer(), DisplayAttitude(), main(), and Propagate(). |
|
|
Set the stored angular velocity state.
Definition at line 86 of file AttitudeState.cpp. References m_AngularVelocity, and O_SESSAME::Vector. Referenced by AttitudeServer(), AttitudeState(), ChangeAttitude(), main(), SetState(), and SetupAttitude(). |
|
|
Set the reference frame of the stored attitude. Will convert the old rotation to the new attitude frame if one was specified.
Definition at line 40 of file AttitudeState.cpp. References m_pAttitudeFrame. Referenced by AttitudeState(), SetRotation(), and SetState(). |
|
||||||||||||
|
Set the stored rotation and corresponding reference frame.
Definition at line 56 of file AttitudeState.cpp. References SetAttitudeFrame(), and SetRotation(). |
|
|
Set the stored rotation.
Definition at line 51 of file AttitudeState.cpp. References m_AttitudeRotation. Referenced by AttitudeServer(), AttitudeState(), ChangeAttitude(), main(), SetRotation(), SetState(), and SetupAttitude(). |
|
||||||||||||||||
|
Set the attitude state given a rotation, an angular velocity and attitude frame (defaults to no frame).
Definition at line 67 of file AttitudeState.cpp. References SetAngularVelocity(), SetAttitudeFrame(), SetRotation(), and O_SESSAME::Vector. Referenced by myAttitudeStateConvFunc(), and QuaternionAngVelConvFunc(). |
|
|
internally stored angular velocity Definition at line 130 of file AttitudeState.h. Referenced by GetState(), and SetAngularVelocity(). |
|
|
internally stored attitude state rotation Definition at line 129 of file AttitudeState.h. Referenced by SetRotation(). |
|
|
rotation reference frame Definition at line 131 of file AttitudeState.h. Referenced by SetAttitudeFrame(). |
 1.3.9.1
1.3.9.1