#include <ExtendedKalmanFilterHistory.h>
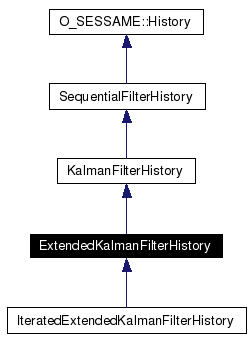
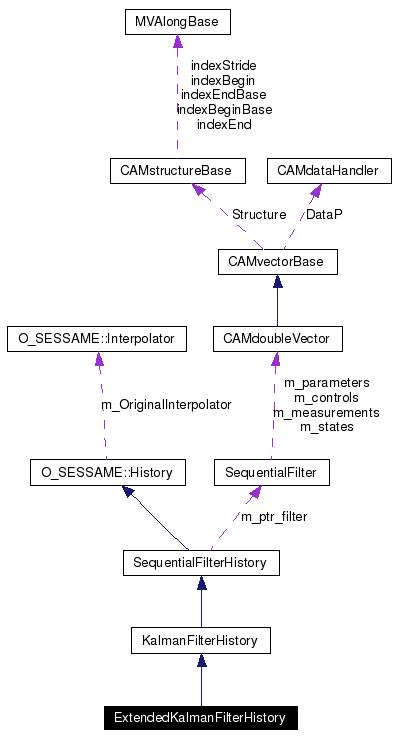
Inheritance diagram for ExtendedKalmanFilterHistory:
Definition at line 27 of file ExtendedKalmanFilterHistory.h.
Public Member Functions | |
| ExtendedKalmanFilterHistory () | |
| ExtendedKalmanFilterHistory (SequentialFilter *_ptr_filter) | |
| Only one constructor. (No empty constructor.) Builds an empty history for the filter instance passed in as a pointer. | |
| virtual | ~ExtendedKalmanFilterHistory () |
| virtual void | AppendHistory (const double &_appendTime) |
| Add the filters's data, which occured at a time in seconds, to the history. | |
| virtual void | AppendHistory (const ssfTime &_appendTime) |
| Add the filters's data, which occured at a time in ssfTime form, to the history. | |
| virtual vector< ssfTime >::difference_type | AppendHistory (const vector< ssfTime > &_appendTime) |
| Add a vector of ssfTime objects to the stored history. | |
| void | ResetHistory () |
| Erases the sequential filters's struct history. | |
| Matrix | GetHistory () |
| Returns a matrix of the filter's basic history (no Kalman information). | |
| void | GetKalmanHistory (Matrix &_sfHistMatrix, Matrix &_kfHistMatrix) |
| virtual Vector | GetIterationHistory () |
| virtual void | SetInterpolator (Interpolator *_newInterpolator) |
| Returns the nearest stored,lower mesh point to the requested time. Sets the interpolator used for calculating the states in-between stored mesh points. | |
Protected Member Functions | |
| void | InitializeSequentialFilterHistory (SequentialFilter *_ptr_filter) |
| Protected initializer function. A pseudo-constuctor for this abstract class, if you will. Takes a pointer to the filter being logged; called from dervied class constructor. | |
| vector< ssfTime >::difference_type | GetState (const ssfTime &_requestedTime) |
| Returns the nearest stored,lower mesh point to the requested time. | |
Protected Attributes | |
| vector< Matrix > | m_kfCovarianceHistory |
| internal vector container of covariance matrices, P. | |
| vector< Matrix > | m_kfKalmanGainHistory |
| internal vector container of Kalman gain matrices, K. | |
| SequentialFilter * | m_ptr_filter |
| Pointer to the filter that the history is logging. Note that because this is a pointer to a base class it can be used to point to an instance of any derived class. | |
| vector< ssfTime > | m_TimeHistory |
| internal vector container of the ssfTime objects describing the state history | |
| Interpolator * | m_OriginalInterpolator |
| internal storage of the original, nominal interpolator to be copied and used for all interpolations | |
| vector< Interpolator * > | m_TimeInterpolations |
| internal vector of time interpolations | |
|
|
Definition at line 30 of file ExtendedKalmanFilterHistory.h. |
|
|
Only one constructor. (No empty constructor.) Builds an empty history for the filter instance passed in as a pointer.
Definition at line 16 of file ExtendedKalmanFilterHistory.cpp. References HISTORY_RESERVE_SIZE, and SequentialFilterHistory::InitializeSequentialFilterHistory(). |
|
|
Definition at line 32 of file ExtendedKalmanFilterHistory.h. |
|
|
Add a vector of ssfTime objects to the stored history. if the beginning of the new time vector is earlier than any of the stored values then the time history will be erased from the overlap point and the new time vector will be appended.
Definition at line 40 of file History.cpp. References O_SESSAME::History::m_TimeHistory. |
|
|
Add the filters's data, which occured at a time in ssfTime form, to the history. Appends the state at t=_appendTime. if the new state occured at a time that is earlier than any of the stored values then the time history will be erased from the overlap point and the new state will be appended.
Reimplemented from SequentialFilterHistory. Reimplemented in IteratedExtendedKalmanFilterHistory. Definition at line 56 of file KalmanFilterHistory.cpp. References SequentialFilterHistory::AppendHistory(), SequentialFilter::GetCovarianceMatrix(), SequentialFilter::GetKalmanGainMatrix(), KalmanFilterHistory::m_kfCovarianceHistory, and KalmanFilterHistory::m_kfKalmanGainHistory. |
|
|
Add the filters's data, which occured at a time in seconds, to the history. Appends the state at t=_appendTime. if the new state occured at a time that is earlier than any of the stored values then the time history will be erased from the overlap point and the new state will be appended.
Reimplemented from SequentialFilterHistory. Reimplemented in IteratedExtendedKalmanFilterHistory. Definition at line 40 of file KalmanFilterHistory.cpp. Referenced by IteratedExtendedKalmanFilterHistory::AppendHistory(), and main(). |
|
|
Returns a matrix of the filter's basic history (no Kalman information).
Reimplemented from SequentialFilterHistory. Definition at line 78 of file KalmanFilterHistory.cpp. References SequentialFilterHistory::GetHistory(), and O_SESSAME::Matrix. Referenced by main(). |
|
|
Reimplemented in IteratedExtendedKalmanFilterHistory. Definition at line 41 of file SequentialFilterHistory.h. References O_SESSAME::Vector. |
|
||||||||||||
|
Returns basic and Kalman history data by reference.
Implements SequentialFilterHistory. Definition at line 100 of file KalmanFilterHistory.cpp. References _, SequentialFilterHistory::GetHistory(), CAMvectorBase::getIndexBound(), SequentialFilter::GetMeasurementVector(), SequentialFilter::GetStateVector(), CAMdoubleMatrix::initialize(), KalmanFilterHistory::m_kfCovarianceHistory, KalmanFilterHistory::m_kfKalmanGainHistory, O_SESSAME::Matrix, and O_SESSAME::MatrixIndexBase. Referenced by main(). |
|
|
Returns the nearest stored,lower mesh point to the requested time. interpolates using the specified interpolator if necessary.
Reimplemented in O_SESSAME::AttitudeHistory, and O_SESSAME::OrbitHistory. Definition at line 84 of file History.cpp. References O_SESSAME::History::m_TimeHistory. |
|
|
Protected initializer function. A pseudo-constuctor for this abstract class, if you will. Takes a pointer to the filter being logged; called from dervied class constructor.
Definition at line 17 of file SequentialFilterHistory.cpp. References HISTORY_RESERVE_SIZE, SequentialFilterHistory::m_ptr_filter, SequentialFilterHistory::m_sfControlHistory, SequentialFilterHistory::m_sfMeasurementHistory, SequentialFilterHistory::m_sfParameterHistory, SequentialFilterHistory::m_sfStateHistory, and SequentialFilterHistory::ResetHistory(). Referenced by ExtendedKalmanFilterHistory(), IteratedExtendedKalmanFilterHistory::IteratedExtendedKalmanFilterHistory(), and KalmanFilterHistory::KalmanFilterHistory(). |
|
|
Erases the sequential filters's struct history.
Reimplemented from SequentialFilterHistory. Definition at line 71 of file KalmanFilterHistory.cpp. |
|
|
Returns the nearest stored,lower mesh point to the requested time. Sets the interpolator used for calculating the states in-between stored mesh points.
Definition at line 149 of file History.cpp. References O_SESSAME::Interpolator::Clone(), and O_SESSAME::History::m_OriginalInterpolator. Referenced by main(). |
|
|
internal vector container of covariance matrices, P.
Definition at line 51 of file KalmanFilterHistory.h. Referenced by KalmanFilterHistory::AppendHistory(), KalmanFilterHistory::GetKalmanHistory(), and KalmanFilterHistory::KalmanFilterHistory(). |
|
|
internal vector container of Kalman gain matrices, K.
Definition at line 53 of file KalmanFilterHistory.h. Referenced by KalmanFilterHistory::AppendHistory(), KalmanFilterHistory::GetKalmanHistory(), and KalmanFilterHistory::KalmanFilterHistory(). |
|
|
internal storage of the original, nominal interpolator to be copied and used for all interpolations
Definition at line 131 of file History.h. Referenced by O_SESSAME::History::SetInterpolator(). |
|
|
Pointer to the filter that the history is logging. Note that because this is a pointer to a base class it can be used to point to an instance of any derived class.
Definition at line 52 of file SequentialFilterHistory.h. Referenced by SequentialFilterHistory::AppendHistory(), SequentialFilterHistory::GetHistory(), and SequentialFilterHistory::InitializeSequentialFilterHistory(). |
|
|
internal vector container of the ssfTime objects describing the state history
Definition at line 128 of file History.h. Referenced by O_SESSAME::History::AppendHistory(), O_SESSAME::History::GetHistory(), O_SESSAME::History::GetState(), O_SESSAME::History::History(), and O_SESSAME::History::ResetHistory(). |
|
|
internal vector of time interpolations
Definition at line 134 of file History.h. Referenced by O_SESSAME::History::History(). |
 1.3.9.1
1.3.9.1