Definition in file testOrbitIntegration.cpp.
#include "orbitmodels/TwoBodyDynamics.h"
#include "Matrix.h"
#include "RungeKuttaFehlbergIntegrator.h"
#include "OrbitState.h"
#include "Plot.h"
#include "orbitframes/OrbitFrameIJK.h"
#include "orbitstaterep/PositionVelocity.h"
#include "LinearInterpolator.h"
#include <vector.h>
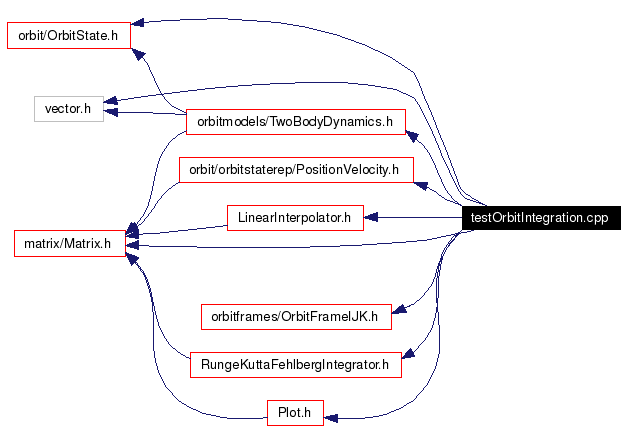
Include dependency graph for testOrbitIntegration.cpp:
Go to the source code of this file.
Functions | |
| Vector | OrbitForcesFunctor (const ssfTime &_pSSFTime, const OrbitState &_pOrbitState, const AttitudeState &_pAttitudeState) |
| Force function that will be called each timestep. | |
| Vector | OrbitForcesWithDragFunctor (const ssfTime &_pSSFTime, const OrbitState &_pOrbitState, const AttitudeState &_pAttitudeState) |
| int | main () |
|
|
||||||||||||||||
|
Force function that will be called each timestep.
Definition at line 26 of file testOrbitIntegration.cpp. References _, O_SESSAME::OrbitStateRepresentation::GetPositionVelocity(), O_SESSAME::OrbitState::GetStateRepresentation(), O_SESSAME::norm2(), O_SESSAME::Vector, and O_SESSAME::VectorIndexBase. Referenced by main(). |
|
||||||||||||||||
|
Definition at line 34 of file testOrbitIntegration.cpp. References _, O_SESSAME::OrbitStateRepresentation::GetPositionVelocity(), O_SESSAME::OrbitState::GetStateRepresentation(), O_SESSAME::norm2(), O_SESSAME::Vector, and O_SESSAME::VectorIndexBase. Referenced by main(). |
 1.3.9.1
1.3.9.1