Definition in file testAttitudeIntegration.cpp.
#include "Matrix.h"
#include "RungeKuttaIntegrator.h"
#include "LinearInterpolator.h"
#include "Plot.h"
#include "Attitude.h"
#include "AttitudeState.h"
#include <vector.h>
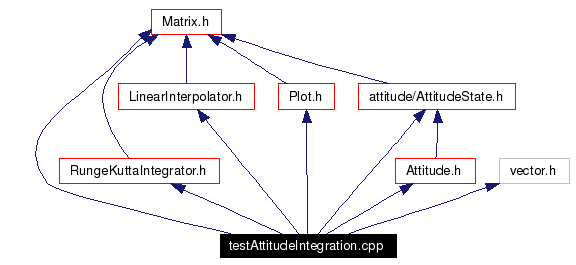
Include dependency graph for testAttitudeIntegration.cpp:
Go to the source code of this file.
Functions | |
| Vector | NullFunctor (const ssfTime &_pSSFTime, const OrbitState &_pOrbitState, const AttitudeState &_pAttitudeState) |
| Vector | AttituteDynamics (const ssfTime &_time, const Vector &_integratingState, Orbit *_pOrbit, Attitude *_pAttitude, const Matrix &_parameters, const Functor &_forceFunctorPtr) |
| Dynamic and Kinematic attitude equations using quaternion and angular velocities. | |
| int | main () |
|
||||||||||||||||||||||||||||
|
Dynamic and Kinematic attitude equations using quaternion and angular velocities.
Definition at line 56 of file testAttitudeIntegration.cpp. References _, O_SESSAME::eye(), CAMmatrixBase::inverse(), O_SESSAME::Matrix, O_SESSAME::MatrixIndexBase, O_SESSAME::norm2(), O_SESSAME::skew(), O_SESSAME::Vector, and O_SESSAME::VectorIndexBase. Referenced by main(). |
|
|
||||||||||||||||
|
Definition at line 23 of file testAttitudeIntegration.cpp. References O_SESSAME::Vector. |
 1.3.9.1
1.3.9.1