#include <Utils/Measurement.h>
#include <matrix/Matrix.h>
#include <Base/Device.h>
#include <Utils/DeviceNames.h>
#include <Base/Sensor.h>
#include <Sensors/AttitudeSensor.h>
#include <Sensors/RateGyro.h>
#include <Sensors/DMURateGyro.h>
#include <Sensors/DMU.h>
#include <Base/Whorl.h>
#include "DefaultObserver.h"
#include <iostream>
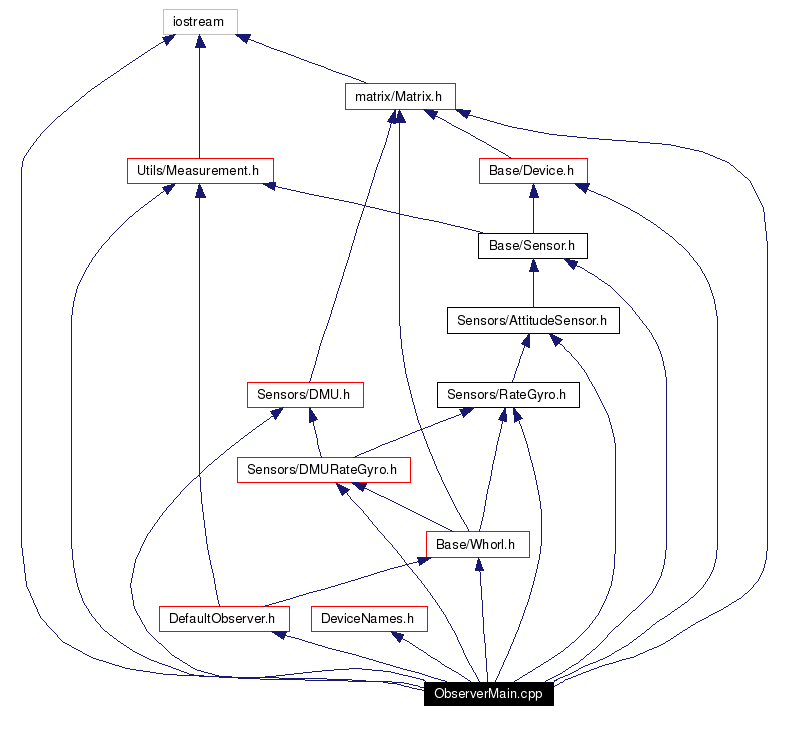
Include dependency graph for ObserverMain.cpp:
Go to the source code of this file.
Functions | |
| int | main () |
|
|
Add the rate gyros to the Whorl object Set Whorl object initial conditions Set Whorl object parameters Definition at line 18 of file ObserverMain.cpp. References DefaultObserver::Initialize(), DefaultObserver::Run(), Whorl::SetControl(), Whorl::SetParameter(), Whorl::SetState(), Whorl::SetTimeOfEstimate(), and O_SESSAME::Vector. |
 1.3.9.1
1.3.9.1