#include <OrbitFrameECEF.h>
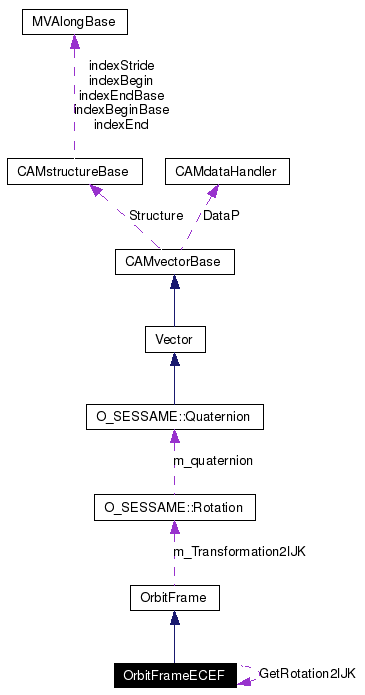
Inheritance diagram for OrbitFrameECEF:
Detailed Description.
Definition at line 21 of file OrbitFrameECEF.h.
Public Member Functions | |
| Rotation | GetRotationFromIJK () const |
Return the rotation  ignores transformation due to precession, nutation, and polar motion. ignores transformation due to precession, nutation, and polar motion.  . . | |
| virtual Rotation | GetRotation2IJK () const =0 |
| virtual OrbitFrame * | NewPointer ()=0 |
| virtual OrbitFrame * | Clone ()=0 |
Public Attributes | |
| OrbitFrameECEF(const double &_ApparentSiderealTime) Rotatio | GetRotation2IJK )() const |
Constructor Return the rotation  ignores transformation due to precession, nutation, and polar motion. ignores transformation due to precession, nutation, and polar motion.  . . | |
|
|
Implemented in OrbitFrameIJK, OrbitFrameNTW, OrbitFramePQW, and OrbitFrameRSW. Referenced by O_SESSAME::OrbitState::operator=(), O_SESSAME::OrbitState::OrbitState(), and O_SESSAME::OrbitState::SetOrbitFrame(). |
|
|
Implemented in OrbitFrameIJK, OrbitFrameNTW, OrbitFramePQW, and OrbitFrameSEZ. Referenced by O_SESSAME::Keplerian::SetPositionVelocity(). |
|
|
Return the rotation
Implements OrbitFrame. Definition at line 43 of file OrbitFrameECEF.h. |
|
|
Implemented in OrbitFrameIJK, OrbitFrameNTW, OrbitFramePQW, and OrbitFrameRSW. |
|
|
Constructor Return the rotation
Definition at line 35 of file OrbitFrameECEF.h. |
 1.3.9.1
1.3.9.1