Definition in file TwoBodyDynamics.h.
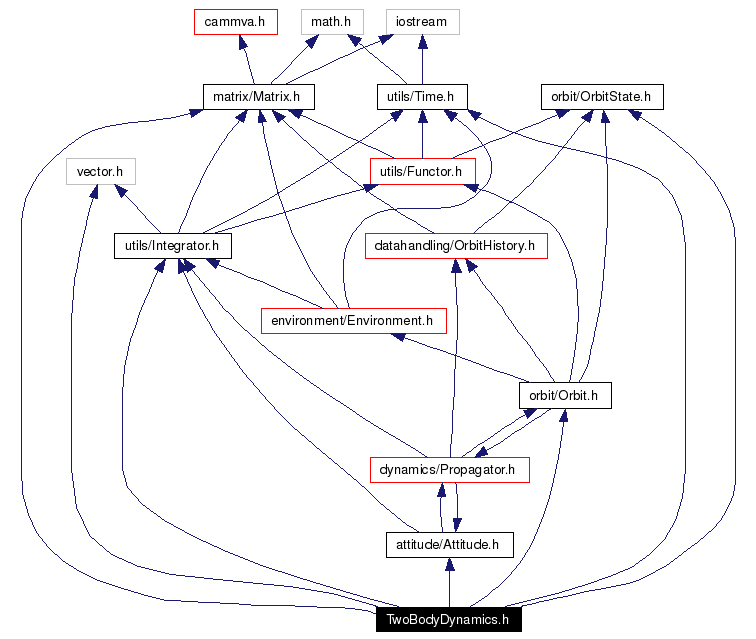
#include <matrix/Matrix.h>
#include <utils/Integrator.h>
#include <utils/Time.h>
#include <orbit/Orbit.h>
#include <orbit/OrbitState.h>
#include <attitude/Attitude.h>
#include <vector.h>
Include dependency graph for TwoBodyDynamics.h:
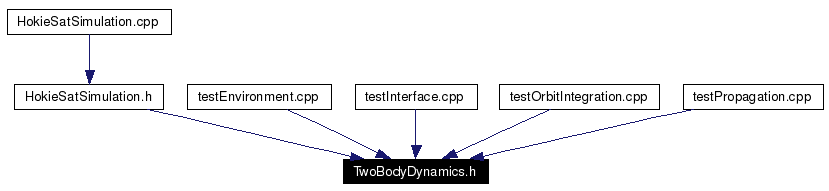
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| void | PositionVelocityConvFunc (const Matrix &_meshPoint, OrbitState &_convertedOrbitState) |
| Orbit state conversion function from Position and Velocity state vector. TwoBodyDynamics. | |
| Vector | TwoBodyDynamics (const ssfTime &_time, const Vector &_integratingState, Orbit *_pOrbit, Attitude *_pAttitude, const Matrix &_parameters, const Functor &_forceFunctorPtr) |
| Orbit equation of motion using position and velocity. | |
|
||||||||||||
|
Orbit state conversion function from Position and Velocity state vector. TwoBodyDynamics. This function converts a matrix of states from the TwoBodyDynamics right-hand side function into an OrbitState object. This conversion function is necessary for propagators to store to an OrbitHistory object regardless of the equations of motion state vector being used.
Definition at line 36 of file TwoBodyDynamics.h. References _, O_SESSAME::OrbitState::GetStateRepresentation(), O_SESSAME::Matrix, O_SESSAME::MatrixColsIndex, O_SESSAME::MatrixIndexBase, O_SESSAME::OrbitStateRepresentation::SetPositionVelocity(), and O_SESSAME::Vector. |
 1.3.9.1
1.3.9.1