Definition in file QuaternionKinematics.h.
#include <rotation/Rotation.h>
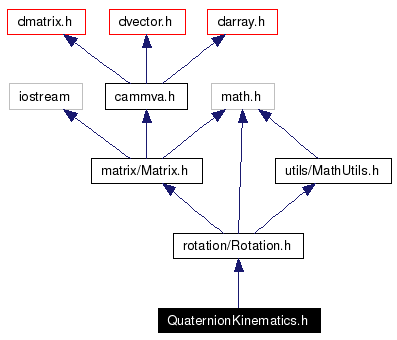
Include dependency graph for QuaternionKinematics.h:
Go to the source code of this file.
Functions | |
| Vector | QuaternionKinematics (const double &_time, const Vector &_qIn, const Matrix &_wIn) |
|
||||||||||||||||
|
Definition at line 16 of file QuaternionKinematics.h. References _, O_SESSAME::eye(), CAMdoubleMatrix::initialize(), O_SESSAME::Matrix, O_SESSAME::MatrixIndexBase, O_SESSAME::QUATERNION_SIZE, O_SESSAME::skew(), O_SESSAME::Vector, and O_SESSAME::VectorIndexBase. |
 1.3.9.1
1.3.9.1