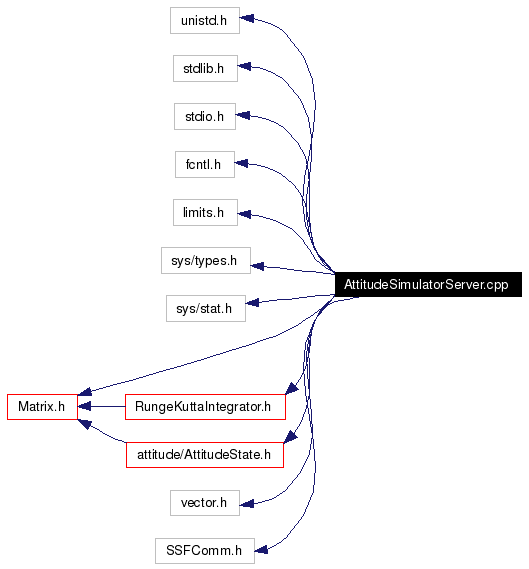
#include <unistd.h>
#include <stdlib.h>
#include <stdio.h>
#include <fcntl.h>
#include <limits.h>
#include <sys/types.h>
#include <sys/stat.h>
#include "Matrix.h"
#include "RungeKuttaIntegrator.h"
#include "AttitudeState.h"
#include <vector.h>
#include "SSFComm.h"
Include dependency graph for AttitudeSimulatorServer.cpp:
Go to the source code of this file.
Functions | |
| Vector | ControlTorques (Matrix CurrentAttState, Matrix DesAttState, double epoch, double count) |
| HokieSat magnetic controller algoritm. | |
| int | AttitudeServer () |
| void | DeviceRun () |
| int | main () |
|
|
Definition at line 117 of file AttitudeSimulatorServer.cpp. References O_SESSAME::AttitudeState::GetState(), O_SESSAME::RungeKuttaIntegrator::Integrate(), O_SESSAME::Matrix, O_SESSAME::AttitudeState::SetAngularVelocity(), O_SESSAME::RungeKuttaIntegrator::SetNumSteps(), O_SESSAME::AttitudeState::SetRotation(), and O_SESSAME::Vector. Referenced by main(). |
|
||||||||||||||||||||
|
HokieSat magnetic controller algoritm.
Definition at line 30 of file AttitudeSimulatorServer.cpp. Referenced by main(). |
|
|
Definition at line 233 of file AttitudeSimulatorServer.cpp. Referenced by main(). |
|
|
Definition at line 247 of file AttitudeSimulatorServer.cpp. References AttitudeServer(), and DeviceRun(). |
 1.3.9.1
1.3.9.1