Definition in file Rotation.h.
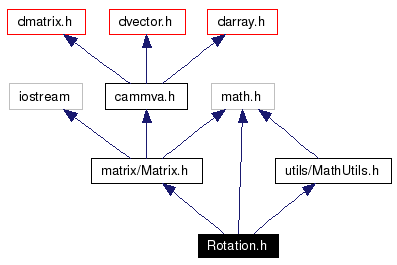
#include <matrix/Matrix.h>
#include <math.h>
#include <utils/MathUtils.h>
Include dependency graph for Rotation.h:
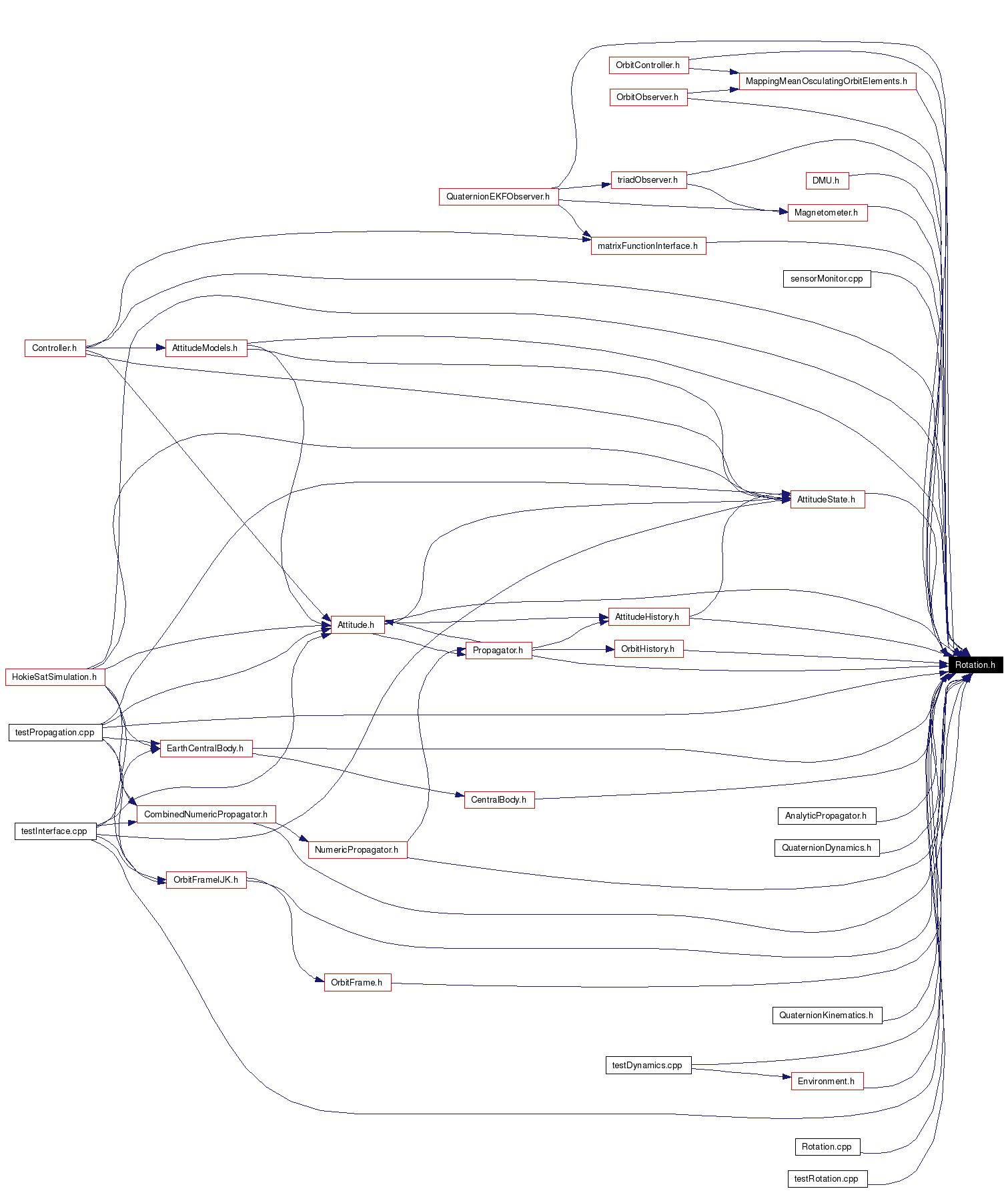
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | O_SESSAME |
Classes | |
| class | O_SESSAME::DirectionCosineMatrix |
| 3x3 direction cosine matrix attitude representation. More... | |
| class | O_SESSAME::ModifiedRodriguezParameters |
| 3x1 Modified Rodriguez Parameters attitude representation. More... | |
| class | O_SESSAME::Quaternion |
| The non-singular, redundant Euler parameter (quaternion) vector. More... | |
| class | O_SESSAME::Rotation |
| A generalized rotation class to represent any attitude coordinate transformation. More... | |
Enumerations | |
| enum | RotationType { DCM_Type, EulerAngle_Type, EulerAxisAngle_Type, MRP_Type, Quaternion_Type } |
| Various representations of a rotation. More... | |
| enum | RotationSense { LEFT_HAND = -1, RIGHT_HAND = 1 } |
| The Sense, or "handedness" of a rotation system. More... | |
Variables | |
| const int | QUATERNION_SIZE = 4 |
| Number of elements in a quaternion vector. | |
| const int | MRP_SIZE = 3 |
| Number of elements in a MRP vector. | |
| const int | DCM_SIZE = 3 |
| Number of elements in a DCM row or column. | |
| const int | EULERAXIS_SIZE = 3 |
| Number of elements in an euler axis. | |
| const int | EULERANGLES_SIZE = 3 |
| Number of elements in an euler angle sequence. | |
 1.3.9.1
1.3.9.1